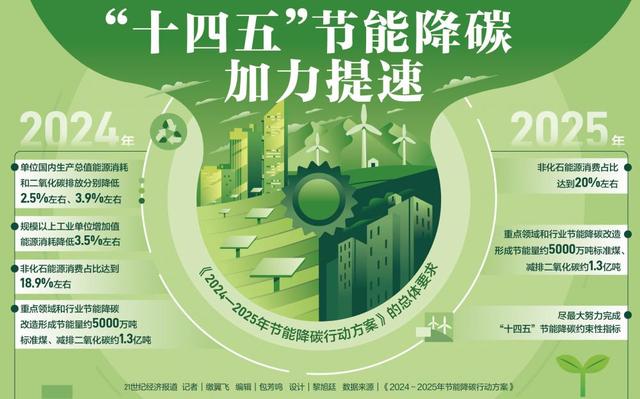
国务院关于印发《2024—2025年节能降碳行动方案》的通知
太阳能赛车峰值功率跟踪器的设计
来源:新能源网
时间:2012-07-31 22:11:52
热度:
太阳能赛车峰值功率跟踪器的设计峰值功率跟踪器,是太阳能电池发电系统中的重要部件。众所周知,在确定的外部条件下,随着负载的变化,太阳能电池阵列输出功率也会变化,但是存在一个最大功率点
峰值功率跟踪器,是太阳能电池发电系统中的重要部件。众所周知,在确定的外部条件下,随着负载的变化,太阳能电池阵列输出功率也会变化,但是存在一个最大功率点Pm以及与最大功率点相对应的电压UMp和电流IMD。当工作环境变化时,特别是日光照度和环境温度变化时,太阳能电池阵列的输出特性曲线也随之变化,与之相对应的最大功率点也随之改变,如图2所示。通常来讲,太阳能电池输出特性曲线的变化与日光照度的变化是成比例的。
但在实际应用中,日光照度的变化再加上工作温度的变化,使得太阳能电池输出特性的变化很复杂。 在太阳能发电系统中没有采用MPPT,而是直接把太阳能电池阵列与蓄电池并联工作时,由于阵列的输出状态受到电池、电机工作状态的限制,输出功率往往不在阵列的最大功率点。MPPT的作用是使太阳能电池阵列工作在最大输出功率点。它是高效率的DC/DC变换器,相当于太阳能电池输出端的阻抗变换器。MPPT是太阳能车、太阳能发电系统、太阳能水泵上常用的功率提升部件。MPPT能使太阳能电池阵列的输出功率增加约15%~36%。
太阳能赛车的MPPT方案设计 本文所述MPPT是为清华大学“追日号”太阳能赛车研制的。“追日号”太阳能赛车的太阳能电池阵列总面积为6.67m2,最大输出功率为825W,开路电压在160V~170V之间,根据太阳能电池阵列输出特性试验,得到阵列最大功率点电压在129.6V~137.7V之间。由此确定蓄电池组由10个12V/20Ah(5小时放电率)的铅酸蓄电池串联组成,额定电压为120V,工作电压在120V~140V之间。蓄电池工作电压在太阳能电池阵列的最大功率点电压附近。 MPPT要实现太阳能电池工作电压到蓄电池电压转换,其本身是需要消耗能量的;同时MPPT应用在“追日号”太阳能车上,它的重量将增加整车功率的消耗。如果MPPT的转换效率过低,应用MPPT所获得的太阳能电池阵列输出功率的增加有可能被MPPT本身消耗掉,甚至起反作用。在工作中,由于日光照度、温度等的变化,太阳能电池阵列的最大功率点(MPP)将随工作环境的变化而时刻变动着,MPPT必须随时监测阵列输出状态的变化,根据智能的控制策略判断最大功率点的位置,调整阵列的工作电压跟踪最大功率点电压,由此实现MPPT的功能。因此,MPPT不仅是一个高效率的DC/DC转换器,更是一个智能的控制系统。
MPPT的硬件设计 MPPT的硬件包括MPPT主回路、微处理器、信号调理电路、PWM驱动电路、电源、通信接口等六个部分。其硬件结构如图3所示。 MPPT的电压转换器采用Buck DC/DC转换器,以MOTOROLA场效应管作为电子开关器件;采用PWM控制方式,工作频率为16kHz。由上述的太阳能电池阵列电压与蓄电池电压可知,MPPT的Buck DC/DC转换器的降压比在0.6~1.0之间。在这个降压比范围内,MPPT的转换效率在86%~99%之间。 由于采用了Buck DC/DC转换器,在太阳能电池阵列的工作电压高于蓄电池电压的情况下,通过调整BuckDC/DC转换器的占空比即可改变太阳能电池阵列的工作电压[3]。电感的电流是连续的,则Buck DC/DC转换器的降压比等于PWM控制信号的占空比。所以MPPT的控制策略是通过调整PWM的占空比D来调整Buck DC/DC转换器的降压比,以达到调整太阳能电池阵列工作电压为最大功率点(MPP)电压的目的。 MPPT微处理器的工作步骤是:首先采集MPPT主回路的电压及电流信号,然后根据最大功率点跟踪策略判断最大功率点的位置,确定PWM信号占空比D的值,最后输出PWM信号给驱动电路。微处理器是MPPT的控制核心,这里采用飞利浦80C552单片机来实现MPPT的控制。而且微处理器可以通过RS232接口与PC机连接,实现MPPT和PC机之间信息的交换。
在信号调理电路部分,设计了线性光耦电路来实现信号的隔离与放大,以保证微处理器部分免受干扰。 1.2 MPPT的软件设计 MPPT的软件采用模块化结构,包括初始化、采样、穷举法跟踪、成功失败法跟踪、PWM输出、串口通讯等模块。系统程序流程图如图4所示。 MPPT最大功率点的跟踪程序分为穷举法和成功失败法两种,MPPT依据太阳能车不同的运行情况,分别调用这两种最大功率点跟踪程序,以实现MPPT的功能。 2 MPPT最大功率点跟踪策略 由于光电转换过程的物理方程难以在实际应用中准确获取参数,同时太阳能电池阵列的工作条件是不断变化着的,因而太阳能电池阵列的输出特性方程在太阳能车的应用中成为一个存在极大值的约束不确定方程。因此MPPT的最优化问题采用直接搜索法求取。
MPPT的跟踪策略为:首先,在启动或重启的时候采用穷举方法进行全局寻优,找到当前最大功率点;然后,在以后的工作过程中采用成功失败法动态跟踪最大功率点。穷举方法,即在D=[0,1]范围内以一定步长搜索获得最大功率的Dmax,则可认为与最大功率点相对应的最优占空比D在Dmax附近。Dmax将作为成功失败法的起点。穷举法的目的是在全局范围内迅速找到最大功率点,穷举法应用于太阳能车启动和系统重启这两个系统对最大功率点完全未知的情况。其中包括太阳能车进入阴影、电池阵列被遮挡等光照情况发生较大变化以及司机人为重新启动系统等情况。 成功失败法的基本思想是每一次搜索都改变步长,若第k次搜索中沿某一方向搜索成功,则阵列输出功率增大,那么第k+1次则仍沿这一方向搜索,并可扩大步长;若第k次搜索失败,则第k+1次应沿反方向搜索,并缩小步长。
在穷举法找到全局最优的基础上,成功失败法的步长将可以设为较小值,有利于尽快找到最大功率点。 3 MPPT的试验研究 为验证MPPT的工作效果,采用LabVIEW软件并结合PC-1216-K3信号采集板搭建的测量系统,检测“追日号”太阳能车发电系统在加入MPPT之前与加入MPPT之后系统各环节的电压、电流值,并计算出相应的功率。通过这些数据曲线便可以看出MPPT对太阳能发电系统性能的改善。 “追日号”太阳能车发电系统在没有MPPT情况下的输出电压、功率曲线如图5所示。 可以看到,阵列的平均输出功率约为125W,工作电压约为117V。在加入了MPPT之后,太阳能电池阵列的发电输出功率有了明显的提高,其输出曲线如图6所示。 由图6可以看出, 太阳能电池的输出功率约为170W,有了明显的提高。单从太阳能电池阵列的角度来看,其发电功率提高了约40W,增幅约为36%。但是从太阳能电池发电系统的构成来看,在系统中增加了MPPT,其本身也要消耗一部分功率。经过MPPT后的输出功率才是真正有效的功率,其输出曲线如图7所示。
最大功率点的跟踪过程是动态的。平均来看,穷举法与成功失败法得到的最大功率点有一微小差距,但是总体来看,成功失败法获得的最优值始终接近最大功率点。虽然穷举法在最初的寻优过程不在最大功率点附近,但是整个穷举法寻优过程只有3.8s,而且很快达到最大功率点附近,因此穷举法的最初寻优过程对阵列输出功率造成的损失是有限的。总体来看,太阳能电池阵列通过MPPT的平均输出功率约为145W,阵列工作电压维持在132V左右。值得注意的是,MPPT在工作过程中的转换效率没有达到理想的99%,其原因有:在MPPT的工作过程中,成功失败法一直处于寻优过程,MPPT也一直处于动态的调整过程中;在成功失败法寻优过程中,有时会调整MPPT进入转换效率相对较低的工作区域。这也说明控制策略是MPFF的重要组成部分,控制策略能够影响MPPT的工作效果。要想进一步提高MPPT系统的转换效率,需要对整个寻优算法及控制过程进行优化。
没有MPPT的太阳能电池发电系统的平均输出功率约为125W,这个功率明显低于MPFF的输出功率:145W(最大功率点)。这与蓄电池电压只有117V左右有关系,因为蓄电池电压过低,使太阳能电池阵列工作电压远离最大功率点电压。 对比两个试验,MPPT使太阳能发电系统的输出功率增加了20W,增幅为16%,MPPT实现了跟踪最大功率的功能。MPPT的应用效果是比较显著的,这也说明了MPPT在太阳能电池发电系统中起着重要作用。当然作者所做的工作与国外的先进水平相比还有一定差距,还有许多地方需要改进与优化。 通过在太阳能电动赛车上使用MPPT,并尝试不同的控制算法,使得太阳能电池发电系统的输出功率提高了约16%,太附能赛车的行驶性能得到了改善。太阳能电池MPPT的应用不仅局限于太阳能赛车,还可以更广泛地应用于其它太阳能发电系统,有效地提高太阳能发电系统的输出功率。当然,MPPT在太阳能发电系统中所起作用的大小不仅与控制算法有关,还与主回路的工作效率有很大的关系,如果主回路的变换效率不高,再好的控制算法也不能有效地提高太阳能发电系统的输出功率。
但在实际应用中,日光照度的变化再加上工作温度的变化,使得太阳能电池输出特性的变化很复杂。 在太阳能发电系统中没有采用MPPT,而是直接把太阳能电池阵列与蓄电池并联工作时,由于阵列的输出状态受到电池、电机工作状态的限制,输出功率往往不在阵列的最大功率点。MPPT的作用是使太阳能电池阵列工作在最大输出功率点。它是高效率的DC/DC变换器,相当于太阳能电池输出端的阻抗变换器。MPPT是太阳能车、太阳能发电系统、太阳能水泵上常用的功率提升部件。MPPT能使太阳能电池阵列的输出功率增加约15%~36%。
太阳能赛车的MPPT方案设计 本文所述MPPT是为清华大学“追日号”太阳能赛车研制的。“追日号”太阳能赛车的太阳能电池阵列总面积为6.67m2,最大输出功率为825W,开路电压在160V~170V之间,根据太阳能电池阵列输出特性试验,得到阵列最大功率点电压在129.6V~137.7V之间。由此确定蓄电池组由10个12V/20Ah(5小时放电率)的铅酸蓄电池串联组成,额定电压为120V,工作电压在120V~140V之间。蓄电池工作电压在太阳能电池阵列的最大功率点电压附近。 MPPT要实现太阳能电池工作电压到蓄电池电压转换,其本身是需要消耗能量的;同时MPPT应用在“追日号”太阳能车上,它的重量将增加整车功率的消耗。如果MPPT的转换效率过低,应用MPPT所获得的太阳能电池阵列输出功率的增加有可能被MPPT本身消耗掉,甚至起反作用。在工作中,由于日光照度、温度等的变化,太阳能电池阵列的最大功率点(MPP)将随工作环境的变化而时刻变动着,MPPT必须随时监测阵列输出状态的变化,根据智能的控制策略判断最大功率点的位置,调整阵列的工作电压跟踪最大功率点电压,由此实现MPPT的功能。因此,MPPT不仅是一个高效率的DC/DC转换器,更是一个智能的控制系统。
MPPT的硬件设计 MPPT的硬件包括MPPT主回路、微处理器、信号调理电路、PWM驱动电路、电源、通信接口等六个部分。其硬件结构如图3所示。 MPPT的电压转换器采用Buck DC/DC转换器,以MOTOROLA场效应管作为电子开关器件;采用PWM控制方式,工作频率为16kHz。由上述的太阳能电池阵列电压与蓄电池电压可知,MPPT的Buck DC/DC转换器的降压比在0.6~1.0之间。在这个降压比范围内,MPPT的转换效率在86%~99%之间。 由于采用了Buck DC/DC转换器,在太阳能电池阵列的工作电压高于蓄电池电压的情况下,通过调整BuckDC/DC转换器的占空比即可改变太阳能电池阵列的工作电压[3]。电感的电流是连续的,则Buck DC/DC转换器的降压比等于PWM控制信号的占空比。所以MPPT的控制策略是通过调整PWM的占空比D来调整Buck DC/DC转换器的降压比,以达到调整太阳能电池阵列工作电压为最大功率点(MPP)电压的目的。 MPPT微处理器的工作步骤是:首先采集MPPT主回路的电压及电流信号,然后根据最大功率点跟踪策略判断最大功率点的位置,确定PWM信号占空比D的值,最后输出PWM信号给驱动电路。微处理器是MPPT的控制核心,这里采用飞利浦80C552单片机来实现MPPT的控制。而且微处理器可以通过RS232接口与PC机连接,实现MPPT和PC机之间信息的交换。
在信号调理电路部分,设计了线性光耦电路来实现信号的隔离与放大,以保证微处理器部分免受干扰。 1.2 MPPT的软件设计 MPPT的软件采用模块化结构,包括初始化、采样、穷举法跟踪、成功失败法跟踪、PWM输出、串口通讯等模块。系统程序流程图如图4所示。 MPPT最大功率点的跟踪程序分为穷举法和成功失败法两种,MPPT依据太阳能车不同的运行情况,分别调用这两种最大功率点跟踪程序,以实现MPPT的功能。 2 MPPT最大功率点跟踪策略 由于光电转换过程的物理方程难以在实际应用中准确获取参数,同时太阳能电池阵列的工作条件是不断变化着的,因而太阳能电池阵列的输出特性方程在太阳能车的应用中成为一个存在极大值的约束不确定方程。因此MPPT的最优化问题采用直接搜索法求取。
MPPT的跟踪策略为:首先,在启动或重启的时候采用穷举方法进行全局寻优,找到当前最大功率点;然后,在以后的工作过程中采用成功失败法动态跟踪最大功率点。穷举方法,即在D=[0,1]范围内以一定步长搜索获得最大功率的Dmax,则可认为与最大功率点相对应的最优占空比D在Dmax附近。Dmax将作为成功失败法的起点。穷举法的目的是在全局范围内迅速找到最大功率点,穷举法应用于太阳能车启动和系统重启这两个系统对最大功率点完全未知的情况。其中包括太阳能车进入阴影、电池阵列被遮挡等光照情况发生较大变化以及司机人为重新启动系统等情况。 成功失败法的基本思想是每一次搜索都改变步长,若第k次搜索中沿某一方向搜索成功,则阵列输出功率增大,那么第k+1次则仍沿这一方向搜索,并可扩大步长;若第k次搜索失败,则第k+1次应沿反方向搜索,并缩小步长。
在穷举法找到全局最优的基础上,成功失败法的步长将可以设为较小值,有利于尽快找到最大功率点。 3 MPPT的试验研究 为验证MPPT的工作效果,采用LabVIEW软件并结合PC-1216-K3信号采集板搭建的测量系统,检测“追日号”太阳能车发电系统在加入MPPT之前与加入MPPT之后系统各环节的电压、电流值,并计算出相应的功率。通过这些数据曲线便可以看出MPPT对太阳能发电系统性能的改善。 “追日号”太阳能车发电系统在没有MPPT情况下的输出电压、功率曲线如图5所示。 可以看到,阵列的平均输出功率约为125W,工作电压约为117V。在加入了MPPT之后,太阳能电池阵列的发电输出功率有了明显的提高,其输出曲线如图6所示。 由图6可以看出, 太阳能电池的输出功率约为170W,有了明显的提高。单从太阳能电池阵列的角度来看,其发电功率提高了约40W,增幅约为36%。但是从太阳能电池发电系统的构成来看,在系统中增加了MPPT,其本身也要消耗一部分功率。经过MPPT后的输出功率才是真正有效的功率,其输出曲线如图7所示。
最大功率点的跟踪过程是动态的。平均来看,穷举法与成功失败法得到的最大功率点有一微小差距,但是总体来看,成功失败法获得的最优值始终接近最大功率点。虽然穷举法在最初的寻优过程不在最大功率点附近,但是整个穷举法寻优过程只有3.8s,而且很快达到最大功率点附近,因此穷举法的最初寻优过程对阵列输出功率造成的损失是有限的。总体来看,太阳能电池阵列通过MPPT的平均输出功率约为145W,阵列工作电压维持在132V左右。值得注意的是,MPPT在工作过程中的转换效率没有达到理想的99%,其原因有:在MPPT的工作过程中,成功失败法一直处于寻优过程,MPPT也一直处于动态的调整过程中;在成功失败法寻优过程中,有时会调整MPPT进入转换效率相对较低的工作区域。这也说明控制策略是MPFF的重要组成部分,控制策略能够影响MPPT的工作效果。要想进一步提高MPPT系统的转换效率,需要对整个寻优算法及控制过程进行优化。
没有MPPT的太阳能电池发电系统的平均输出功率约为125W,这个功率明显低于MPFF的输出功率:145W(最大功率点)。这与蓄电池电压只有117V左右有关系,因为蓄电池电压过低,使太阳能电池阵列工作电压远离最大功率点电压。 对比两个试验,MPPT使太阳能发电系统的输出功率增加了20W,增幅为16%,MPPT实现了跟踪最大功率的功能。MPPT的应用效果是比较显著的,这也说明了MPPT在太阳能电池发电系统中起着重要作用。当然作者所做的工作与国外的先进水平相比还有一定差距,还有许多地方需要改进与优化。 通过在太阳能电动赛车上使用MPPT,并尝试不同的控制算法,使得太阳能电池发电系统的输出功率提高了约16%,太附能赛车的行驶性能得到了改善。太阳能电池MPPT的应用不仅局限于太阳能赛车,还可以更广泛地应用于其它太阳能发电系统,有效地提高太阳能发电系统的输出功率。当然,MPPT在太阳能发电系统中所起作用的大小不仅与控制算法有关,还与主回路的工作效率有很大的关系,如果主回路的变换效率不高,再好的控制算法也不能有效地提高太阳能发电系统的输出功率。
上一篇:热管真空管太阳热水系统的设计

-
如何提高太阳能电池效率2024-08-16
-
太阳能光热发电领域即将破冰2024-08-16
-
2011年德国太阳能装机量创下7.5GW历史记录2024-08-16
-
太阳能供电与半导体制冷箱的设计2012-07-31
-
太阳能烟囱发电技术的特点2012-07-26
-
太阳能光伏发电原理应用及发展前景2012-07-26
-
多种太阳能热水系统运行方式原理2012-07-24
-
太阳能热水器安装及使用注意事项2012-07-24
-
分体式太阳能热水器在建筑节能的应用2012-07-23
-
LED与太阳能结合的照明技术2012-02-22
-
REC太阳能模块因最佳性能赢得2011年业界领先的测试2012-02-21
-
屋面太阳能光伏发电系统解决方案2012-02-21
-
太阳能热水器的工作原理2012-02-20
-
太阳能照明原理组成及控制系统2012-02-20
-
太阳能与空气能之争2012-02-15