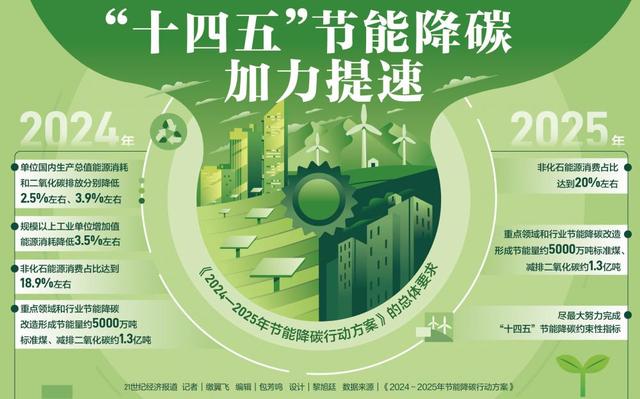
国务院关于印发《2024—2025年节能降碳行动方案》的通知
串联式燃料电池混合动力汽车零部件选型和匹配优化研究
来源:新能源网
时间:2015-03-06 16:47:39
热度:
串联式燃料电池混合动力汽车零部件选型和匹配优化研究[摘要]采用两种优化算法对燃料电池混合动力汽车的两种能量管理策略进行了优化仿真。结果符合实际的设计要求,可以作为零部件选型和匹配的
[摘要]采用两种优化算法对燃料电池混合动力汽车的两种能量管理策略进行了优化仿真。结果符合实际的设计要求,可以作为零部件选型和匹配的依据。
前言
由于混合动力汽车是由发动机和蓄电池两动力源提供动力,它的设计要比由单一动力源(发动机)提供动力的传统汽车设计复杂得多。当前主要是采用经验和试算的方法,参考传统车的选型模式,通过一些经验公式确定各部件的功率等级及相关参数的范围,然后选取满足条件的零部件,再对所选参数进行验证或调整,如此选出的零部件有很多局限性,虽然能满足汽车的性能,但各零部件以及之间的匹配并不最优,且该过程需要多次反复验证和调整。
国外主要集中在能量管理和分配策略的研究,专门论述匹配优化的文献很少,其中ADV ISOR软件中有匹配的功能,该软件主要是针对已有的零部件参数进行调整和计算,且针对具体的工况和车型。文中以串联式燃料电池混合动力汽车为研究对象,通过对研究对象的分析和转化,将串联式混合动力汽车的动力源选型和匹配问题转化为数学优化问题,并针对不同的能量管理策略对零部件性能的考虑,运用优化算法对其进行求解,根据得到的结果进行分析研究。
1 优化构型介绍
串联式燃料电池混合动力汽车的构型如图1所示,整车方案由燃料电池发动机、DC/DC、动力蓄电池、电机和变速器组成,图1中实线为机械连接,虚线为电气连接,燃料电池发动机发电,通过DC/DC转换后,和蓄电池进行电耦合,给电机提供能量,电机带动变速器驱动整车工作。
图2为零部件能量输入输出示意图,为了减少优化的参数以及处理需要,将燃料电池发动机和DC/DC作为一个整体考虑,图中用PS表示。控制单元负责能量管理策略,决定PS和电池堆的工作状态和输出功率以及电机的工作状态。
对于研究的燃料电池汽车,其整车参数如表1,动力性指标如表2所示。
2 优化问题的转化和处理
上面的优化问题可以描述为,对于指定的整车结构参数、动力性指标以及选定的工况,选取不同功率等级和特性的动力传动系部件,使整车在满足动力性指标的条件下燃料经济性最好。即在动力性指标约束下,寻找最优的零部件和其性能参数使整车燃料经济性最好。
2.1 优化函数确定
目标函数为循环燃料经济性,由燃料电池发动机的氢气消耗量和蓄电池SOC变化折算的氢气消耗量两部分构成,即
式中b为发动机燃料消耗率,U、I分别为电池的电压和电流,Peng为燃料电池发动机输出功率,Qfuel为燃料低热值,Xeng、Xbat、Xmot分别为发动机、电池和电机的功率等级,T为循环工况总时间。
由于串联式混合动力车的所有机械能均由电机输出,所以电机的选择以满足整车的动力性指标为前提,据此得到电机的最大功率,而电机的高效区工况点分布则由对应的循环工况转换得到,最后得到满足要求的电机功率,以及效率map图等性能指标。如此则可以减少优化问题的参数,将上面的优化目标函数转化为蓄电池和燃料电池功率等级的选择问题。其中动力总需求可由式(2)确定
式中Pneed为整车功率总需求,m为整车质量,CD、A分别为整车空气阻力系数和迎风面积,v为车速,D为旋转质量换算系数。
此时的发动机功率需求和蓄电池功率需求为
式中V(SOC,Pneed)为功率分配系数,由控制策略决定。
2.2 约束条件的转化
约束条件为动力性指标,即动力部件能满足最高车速、最大爬坡度和加速时间的要求,如表2所示,将其转化为对应的燃料电池发动机和蓄电池功率大小的约束,即
式中Pneed(vmax)为最高转速时的功率需求,Pi(v)为车速v和坡度i时的功率需求,Geff、Gmot分别为机械传动效率和电机效率,Tmot为电机的输出转矩,i0、ig分别为主减速器和变速器速比,r为车轮半径,Pfc_max、Pbat_max分别为燃料电池和蓄电池的最大输出功率。
对于最高车速,由式(2)得到达到最大车速需要的功率,即
由最大爬坡度要求得到整车的功率需求为
加速时间的约束为加速阶段,每时刻电机转矩Tmot(t)和对应的车速v(t)应满足
式中fw、ff分别为当前车速下的风阻和滚阻,vset为加速时间指标中给定的终止速度。
2.3 控制策略
对于不同的控制策略,代表着整车对相应的零部件的性能和要求不同,文中给出了串联式混合动力汽车采用的典型的两种能量管理策略,分别为开关式控制策略和功率跟随式控制策略。通过对比分析不同的控制策略以及控制参数的优化结果,综合考虑和分析得到适合不同设计需求的零部件选型和优化的结果。
(1)开关式控制策略 发动机开关由电池SOC的上下限决定,发动机工作时,其工作在最佳燃料经济性点上,该控制策略主要由蓄电池来跟随和响应整车的功率需求。
(2)功率跟随式控制策略 由功率需求和电池SOC决定发动机启停,发动机工作时工作在最佳燃料经济性曲线上,且尽量维持蓄电池SOC为设定的值,以保证续驶里程。
控制策略主要用来根据工况对功率进行分配,但很难用数学表达式表达,文中通过模型建模来实现控制策略。
2.4 优化算法介绍
对于上述的优化问题,可采用工程化的优化算法来处理,并利用工程化的方法处理优化问题中的收敛和边界条件等,最后得到较优的优化结果。
对于上面描述的优化问题,文中采用序列二次规划和分割矩阵法两种优化算法对问题进行优化求解。将上面工程化问题转化得到的数学模型,以及通过由建模来表示的控制策略代入到两种优化算法中,设置截止条件,然后通过叠代计算,得到下面的结果,两种优化算法如下。
(1)序列二次优化算法(SQP)
对于给定的初始值,构造二次规划子问题,通过求解二次规划子问题,得到搜索的方向和步长,迭代优化求解。该算法的优点是算法成熟,对平滑问题非常有效,但需要优化函数可导,同时得到的是局部最优解。
(2)分割矩阵法(DIRECT)
对于优化区间,先归一化,并计算中心点的函数值,设置迭代次数,确定最优化矩阵集合,在集合中选取矩形进行分割计算其中心点值,直到达到迭代次数或者优化区间迭代完成。该算法不要求优化函数可导,可以得到全局优化,并且不需要选择初始值,优化过程不需要控制参数。但该算法没有收敛准则来判断优化是否收敛,因此只能对少量的变量进行优化。
3 优化结果分析
基于典型公交车城市工况,可以得到基于工况的平均输出功率,折算到燃料电池发动机,其功率为42kW,即采用燃料电池发动机最佳工作点位于42kW附近,由此对比得到燃料电池的功率等级在52kW左右,为了满足工况的要求,蓄电池需要能提供的瞬时功率达到了150kW,对于80A#h的大容量电池,3C放电需要的电压等级达到625V,这需要52个采用10个单体电池构成的蓄电池模块才能满足要求,得到的结果无法使用。
针对上面的优化问题,对其建立整车、零部件以及控制策略的模型,采用两种优化算法进行优化仿真,最后得到的结果如表3所示。
3.1 控制策略的比较分析
开关式控制策略一般应用于燃料电池发动机动态响应差、以蓄电池为主要动力源、混合度大的车型,因此一般采用比较大的蓄电池。对于这种控制策略,当电池SOC在013~018之间时,意味着蓄电池需要在很大范围内提供动力,该控制方式下,燃料电池很少参与工作,大部分工况由蓄电池提供动力。
而当电池SOC在014~016之间时,由于SOC控制范围小,即蓄电池的工作范围比较小,最终优化得到的蓄电池模块数相对于电池SOC在013~018的控制策略少。电池SOC 在013~018之间时,主要由蓄电池提供动力,电池容量大,充放电电流小,效率高,且电量的消耗均在燃料电池最高效率点补充,所以经济性好;而电池SOC在014~016之间时,蓄电池容量小,充放电电流大,效率低,且发动机启动和停止时,由于有功率变化率的限制,消耗的燃料也多,所以经济性比电池SOC在013~018之间差。
功率跟随式控制策略适用于燃料电池发动机有较好的动态响应,以燃料电池发动机为主要动力源,且为中度或轻度混合的车型。该控制策略要求燃料电池能提供大部分的驱动能量,由图3、图4可以看到,燃料电池提供了大部分的能量,蓄电池用来弥补燃料电池不足的功率需求,其功率输出基本在20kW以下,且电池SOC基本维持在015附近。
由于燃料电池发动机动态变化,其工况点不是经济性最佳点,但由于燃料电池在很大的范围内有很高的效率,所以功率跟随式控制策略得到的燃料经济性比开关式控制策略电池SOC在014~016之间得到的经济性好,但比电池SOC在013~018之间的经济性差。
由于工况的平均功率需求为50kW左右,为了满足动力性指标要求,需要的功率为200kW左右,虽然两种不同的控制策略导致基于工况的主要功率输出部件不同,但由于动力性指标的限制,最终的结果零部件的功率等级都较高。
3.2 不同优化算法的比较分析
对比两种优化算法可以看到,对于开关式控制策略,在电池SOC范围为013~018的区间,由于主要大部分工况都是由蓄电池工作,所以得到的优化结果相同,而在电池SOC为014~016的区间,两种算法得到的优化结果有较大的差别,但燃料经济性指标基本相同,主要因为两种优化算法采用的结束条件不同,导致最后的最优结果不同,见图5、图6。
由图5、图6可以看到,整个循环中,燃料电池发动机初始状态为关闭,驱动中大部分均由蓄电池提供驱动能量。采用较小的蓄电池时(见图5),燃料电池发动机主要在电池SOC低于设定值或工况最后一段功率需求大时启动,燃料电池工作的时间长,该阶段利用燃料电池提供动力和给蓄电池充电,有利于提高系统效率,但蓄电池的放电电流较大,对蓄电池的寿命不利,且蓄电池的效率较低。采用较大的蓄电池时(见图6),蓄电池的放电电流减小,有利于电池的寿命以及充放电的效率,燃料电池主要用来维持蓄电池的SOC值。
4 结论
(1)对于不同的能量管理策略,对应着不同的对动力部件的选型要求,选型时需要充分考虑能量管理策略对零部件性能的影响。
(2)对于同样的控制策略,可能有多组优化解,因而需要结合实际零部件性能来考虑采用何种组合的零部件。
(3)SQP算法需要预先给定合适的初值,DIRECT算法则不需要,但DIRECT算法由于没有收敛准则,优化求解时间比SQP算法长,但两种算法均能对该问题进行求解。
该方法和结果可为串联式混合动力车的零部件选型和匹配提供依据。(万亮 王丽芳 廖承林 中国科学院电工研究所,北京100080;张俊智 清华大学,汽车安全与节能国家重点实验室,北京100084)
上一篇:复合材料风电叶片有限元刚度分析