
五部门关于开展2024年新能源汽车下乡活动的通知
车云协同计算直击软件定义汽车的痛处
来源:新能源汽车网
时间:2021-12-09 10:13:24
热度:
车云协同计算直击软件定义汽车的痛处文︱立厷在软件定义汽车的大背景下,单车硬件能力受到了比较制约。近年来,为了支持智能汽车软件的持续发展,行业也在探索结合5G边缘云,将一部分算力释放
文︱立厷
在软件定义汽车的大背景下,单车硬件能力受到了比较制约。近年来,为了支持智能汽车软件的持续发展,行业也在探索结合5G边缘云,将一部分算力释放到云端,以提供弹性和可扩展的车规级应用和车规级操作系统的能力,以此实现的车云结合的协同计算架构将助力软件定义汽车的持续发展。
在以“智车智驾 智创未来”为主题的2021中关村智能网联汽车国际创新论坛上,国汽智控(北京)科技有限公司研发副总裁张小斌从车载车规级操作系统、车云协同计算基础框架及应用角度分享了应对软件定义汽车挑战的一些思考。
软件定义汽车的核心所在
张小斌指出,汽车行业正在发生翻天覆地的变化,硬件趋同、软件定义、数据驱动、汽车电子电气架构也在改变,越来越趋向于中心化的车载计算平台;智能汽车的代码量已达到十亿行量级,越来越多的功能移到了云端。
摆在行业面前的课题一个接着一个:结合汽车计算平台的云计算应该是什么样的结构?其体现的具体形式是什么?如何让车云协同体系架构落地,且能够推而广之,丰富产业生态?
这些问题都是软件定义汽车发展中所面临的挑战。要实现高级自动驾驶功能,需要在车端部署很多传感器和高算力平台。在车载方面,虽然从电子电气架构到传感器都有很多探索和创新,丰富了产业生态,但是单车智能能力毕竟有限,硬件应该持续加载到什么程度?从整车厂的成本,包括软件可迭代性方面考虑,还有一些更深层次的问题需要进一步探讨。
另外,低配车很多是现在和未来的现实,在市场上占了绝大多数。如何让低配车也能享受到高级自动驾驶功能的好处,特别是安全性?车辆生命周期是5-10年,整车厂售出汽车之后在软件升级迭代更新方面也面临很多实际问题。因为传统整车厂对可靠性、安全性方面有非常严格的要求。经常能看到一辆新车在汽车园区、高等级测试场白天黑夜在跑,所以测试验证周期非常长。
因此,核心问题在于:如何以有限的车端算力支持后续的软件更新和能力扩展?
为什么车控操作系统要孪生到云端?
张小斌介绍说,2019年,出版的《车控操作系统架构研究报告》分解出了功能软件架构和系统软件架构。很多同行也是在按照这个架构在进行车载操作系统方面的研发。国汽智控还提出了“车云孪生”架构,其中包括几个部分:车载计算平台、车载操作系统、计算域、AI域等。而车载操作系统又分为实时操作系统和车载操作系统(如Android),前者负责汽车安全相关的工作任务,已提前设定好谁先执行谁后执行,例如遇高速撞车时必须弹开气囊;后者负责人机交互部分,如安装视频、音乐和系统设置、升级等。
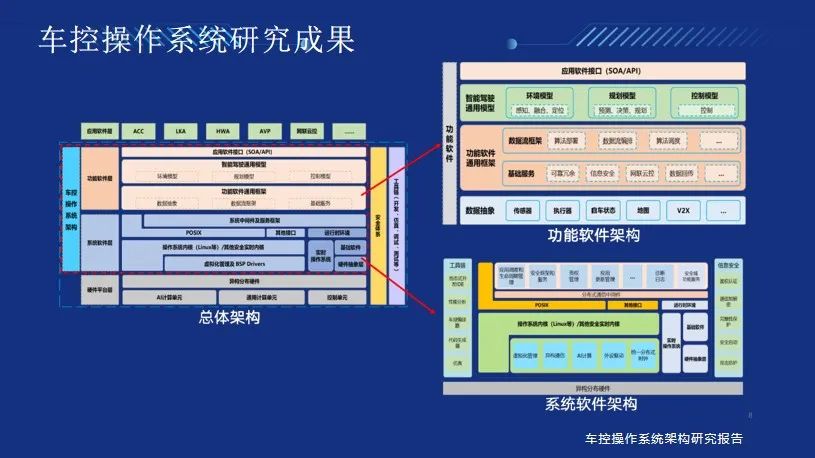
目前进行的大量尝试证明,将一部分车载操作系统的功能以整体方式孪生到云端的方案是可行的。对于整车厂来说,首先要满足车规要求,对车载操作系统来说,作为感知和规划的输入语言,现在的很多车路云、各种传感器,包括V2X,能够与整车智能操作系统的输入端完全兼容,所以可以把车规级软件以整体方式孪生到云端。
孪生到云端的车载操作系统与整车中的操作系统的底层硬件平台是不一样的,但是接口、数据流、感知、规划方面的行为完全一样。这样,通过5G边缘平台能够使原来受限的车端算力无限放大。在此之上,结合5G边缘云以及中心云的连接和丰富的云端功能,就可以产生大量的应用,因为车端操作系统和云端操作系统可以被认为是逻辑整车操作系统。在逻辑整车操作系统之上,完全兼容大量现有的车路云V2X功能,而整个逻辑操作系统是软件定义的,可以用行业里很多比较成熟的软件定义方式进行OTA升级和软件功能的迭代,利用算法接口进行丰富的应用生态开发和研究。
这是一个创新的想法,但是也面临着一些技术考验。目前相关团队正在努力攻克这些技术挑战,包括一些核心技术。其中包括5G网络,现在中国联通、中国移动、中国电信都在建设覆盖全国的5G MEC,北京5G MEC基本上已经覆盖全部城区和高速公路,延迟在15毫秒左右,基本上已经能够达到实时计算的要求。
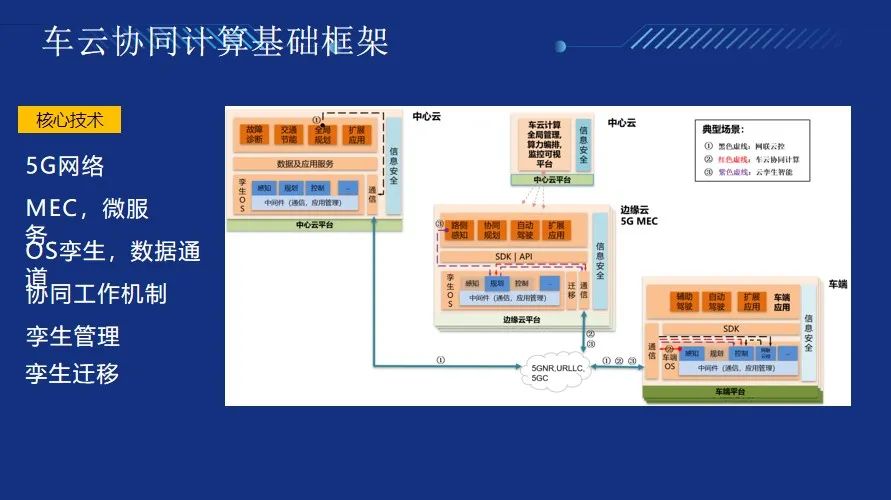
这样就可以将5G低延迟网络视为车载操作系统内部的内网。很多软件、汽车行业操作系统的很多组件都可通过SOA数据驱动的方式将云与孪生操作系统结合起来,形成更广泛、功能更丰富的操作系统能力。其中的技术问题还涉及整车操作系统和孪生操作系统的协同工作机制、孪生体的管理,包括跨MEC的边缘迁移,这些都需要和运营商一起合作解决。这不是技术上的问题,而是生态和基础设施建设推动丰富应用的方式,相信很快能够得到解决。
除了车载操作系统,车载计算平台包括系统软件、功能软件、应用软件,在软件和硬件解耦的背景之下,可以把系统软件和功能软件平移到5G边缘云,因为车载操作系统本身是车规级的,通过孪生体数据孪生到云端之后,它还是保持车规级能力。
研究表明,以5G作为中间操作系统的实时计算网络,其模型基本上是可以成立的,在北京、天津一些专有5G网络和公共网络上都做了相应的实验,在云端通过这种方式进行一些自动驾驶的控制场景是完全是可行的。剩下的事情是让孪生到云端的操作系统更加稳定,朝着可以量产的方向进行研发和设计。这个操作系统叫做车云操作系统,或者叫车云孪生操作系统。它基本上统一了车云应用开发的运行环境,支持高效的软件功能开发和运行环境,可以通过这种方式快速迭代,丰富整个产业链。
算力如何分配?
张小斌认为,“车云孪生”可以突破单车硬件的算力限制,为车端功能开发提供可扩展平台。那么,车端与边端的算力应该怎样分配呢?
要根据驾驶场景使用云端资源,静态、动态协商功能分配,实现网络状态监测及降级运行,跨MEC带状态进行迁移。
在这个过程中,肯定会涉及一些具体的内部设计,包括根据驾驶场景进行云端资源和车端资源的算力和功能的调配。因为基于SOA架构和数据驱动,所以操作系统中的组件是分层、分模块的,可以通过数据去关联在一起,所以算力可以在云端和车端灵活调配,这样,低端车就可以在云端拥有高级自动驾驶功能,解放了车端硬件的算力瓶颈。
当然,在这个过程中也可以让车端和云端进行动态功能协商,一部分功能可以在车端运行,还有一部分功能可以根据当时的驾驶状况孪生到云端。如果在云端碰到一些其他失效原因,则可以通过降级运行的方式来保证自动驾驶车辆本身的安全和人员的安全。
难点问题还包括网络状态的监测和降级运行。另外,对这套方案影响比较大的是手机可以跨省漫游,所以车也需要解决跨MEC漫游的问题。
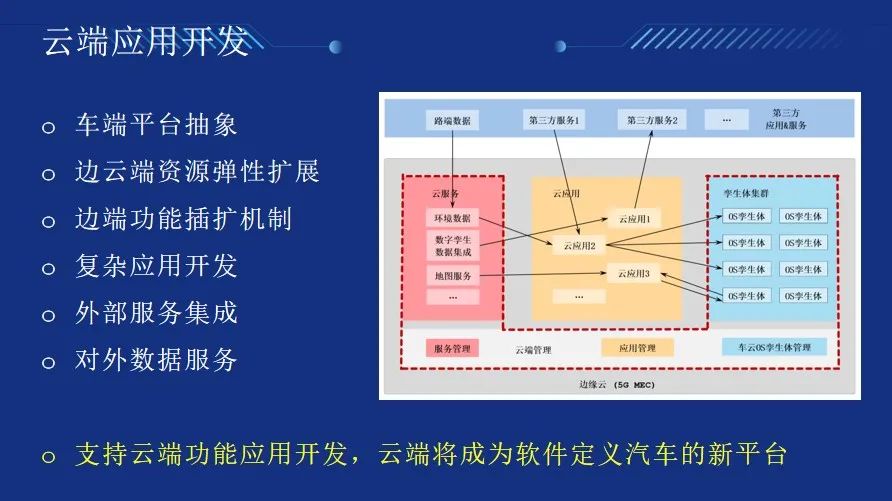
在典型应用架构中,车端很多应用可以作为其他应用的功能载体,或者数据源载体。通过数字化整车孪生云端,可以产生更多的数字化应用,与现有的车路云、智慧公路、智慧交通、智慧城市等项目紧密地结合在一起。
统一体系架构带来的好处包括:自然支持现有的网联云控应用,车端和云端的结合可以更多地感知到环境数据;同时因为车端车控操作系统孪生到云端提供了标准的接口,原有的很多车端应用可以继续在云端运行。
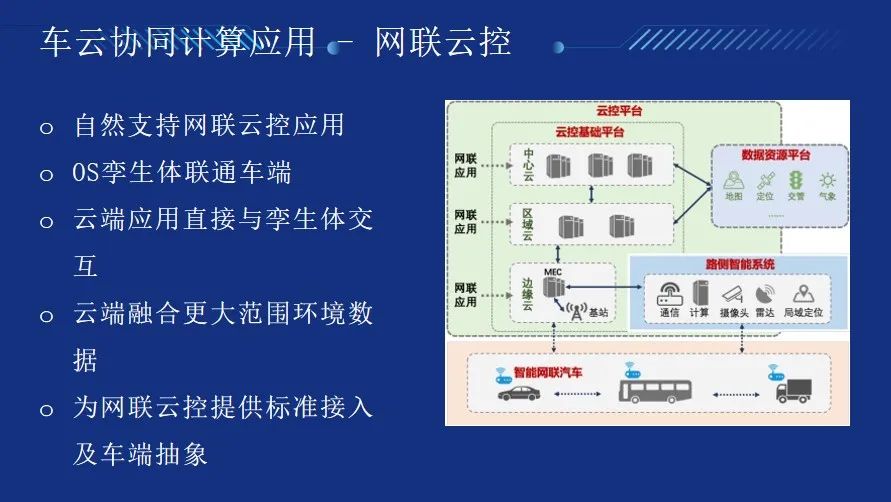
通过云端5G丰富的资源可以解决车端算力受限的问题,在提升单车算力的同时5G边缘云和孪生还支持系统天然解决多车协同的问题。
具体讲,算力是在车边静态或动态浮动,可以根据场景提高自动驾驶等级,突破单车硬件的限制,将高算力功能部署在云端,为后续软件迭代提供算力支持。
在多车协同方面,云端有多数据源,还可以接收路侧设备、公共服务(地图、天气、交通等)数据、多车行驶等数据,在云端实现大规模场景融合、多车最优规划,提高多车驾驶的安全性和效率。
好处还有很多
孪生方式运行到云端还有其他好处,因为车端车控操作系统中有很多控制动力、底盘的感知数据,通过孪生方式在云端运行有助于辅助车辆设计,包括人们熟悉的工业互联网整车设计也可以在云端打通,整车厂能够在云端进行更大范围的场景规划设计,包括车端部件仿真设计、车控软件测试和软件功能复现、与其他仿真环境集成完成整车设计的快速验证调优。
张小斌最后指出,车云协同计算可以保障软件定义的持续发展,充分利用5G和MEC提供的低延时、高带宽网络和计算资源,使边缘云与车载计算平台协同组成可扩展算力平台,为软件定义汽车提供持续的算力和能力支持,支持车辆全功能开发和仿真;车云协同计算还将推动5G应用落地,实现车端算力扩展、云端应用开发和软件定义实施,也是落实中国方案的有效方案。
上一篇:试驾新款江铃域虎7,纵享野趣无限


-
理想汽车即将新增导航辅助驾驶功能,在新势力相比有何亮点?2021-12-07
-
开测“高精度定位”功能,华为的该技术有何特征?2021-12-01
-
新增多路线导航等功能 特斯拉推出软件新版本2021-11-30
-
地平线与上汽零束达成战略合作,引领“软件定义汽车”创新2021-10-27
-
智能座舱的“抬头显示”功能有何作用?2021-10-26
-
vivo推出Jovi智能车载,其软件系统实力如何?2021-10-25
-
小鹏回应P7开启NGP功能后高速公路追尾大货车:将进一步分析2021-09-27
-
不同意不给开 理想汽车软件更新再现“霸王条款”2021-09-24
-
特斯拉升级 Autopilot 辅助驾驶软件 再也不怕撞警车了2021-09-24
-
辅助驾驶事故引争议后,蔚来新版车机系统新增驾驶员紧急辅助功能2021-09-03
-
二季度特斯拉全自动驾驶软件包购买率仅为11%2021-09-02
-
特斯拉驾车看手机检测功能上车 超过15秒自动警告2021-08-31
-
涵盖6大板块多项功能 高合HiPhi X推送全新OTA升级2021-08-27
-
不再吹牛了?马斯克:特斯拉最新款测试版自动驾驶软件“不是很好”2021-08-24
-
特斯拉自动辅助驾驶遭调查后:马斯克承认最新自动驾驶软件不够好2021-08-24