
五部门关于开展2024年新能源汽车下乡活动的通知
自动驾驶车辆是如何理解周边环境,并做出驾驶决策的?
来源:新能源汽车网
时间:2021-08-27 10:04:16
热度:
自动驾驶车辆是如何理解周边环境,并做出驾驶决策的?全球汽车快讯 据外媒报道,美国汽车工程师学会(SAEInternational,the Society of Automotive
全球汽车快讯 据外媒报道,美国汽车工程师学会(SAEInternational,the Society of Automotive Engineers)将车辆自动化的程度分了六个等级:从0级自动驾驶(我们日常使用的常规车辆)到5级自动驾驶(无需人员介入操作的车辆)。
目前的技术水平,距5级自动驾驶水平仍遥遥无期,因为有许多驾驶情境,自动驾驶车辆无法像人类驾驶员那样去应对。
换言之,若汽车业及学术技术能够再接再厉,或许5级自动驾驶车辆的到来要比我们的预期早一些。一辆没有方向盘的汽车,您能想象其运行情况吗?
让我们来关注下某些可实现车辆驾驶的自动化操作的促成技术吧,并了解下这类技术是如何被整合到车辆中,从而使轿车、卡车或SUV能够在街道上自动航行的。
首先,让我们想象下,我们想要令车辆自动化,该车辆需要以下三要素的辅助:
自动驾驶车辆所需的元件
高清地图
状态与地理定位观测器
动作操控
在我们计划解决这类自动驾驶车辆的核心问题时,我们还需要先了解一些背景概念,如:我们所使用的传感器。
自动驾驶车载传感器
激光雷达:该遥感法借助脉冲激光器发射光束,从而完成测距(可变距离)。该技术可扫描道路和楼宇。凭借激光雷达扫描,我们的设备生成云点(从字面上讲,就是点的数据集),以此来呈现真实世界的环境。
雷达(无线电定向与测距,radio detection and ranging):该探测系统采用无线电波来测定目标物的范围、角度或速度。雷达是一款用于自动驾驶车辆的、简单的传感器,尽管其测距能力较近,但相较于激光雷达,其价格相对便宜。目前,我们的车辆已采用雷达技术,将其用于停车时的碰撞规避功能。
全球(卫星)定位系统(GPS):简单地说,我们都知道GPS的含义。当您使用所需的智能手机时,你或许需要确定自己在地球上的具体地理定位。当您启用GPS后,您就拥有了谷歌地图或其他地理定位相关的功能。
摄像头:这类重要的车载传感器使车辆能够识别真实世界中的目标物和人。得益于机械学习技术的最新发展,特别是卷积神经网络,自动驾驶车辆可使用摄像头来实现目标检测和目标识别。
如今,让我们关注下自动驾驶的核心方面。
高清地图
车辆需要完成的头一件事情就是要探查车辆在全球中的位置。为此,自动驾驶车辆需要配置高清地图,该地图含有大量的道路及周边环境的数据。打造高清地图需要耗费大量的精力,目前,有许多公司专注于制作高清地图,并确保其数据处于最新状态。
为创建高清地图,需要结合使用激光雷达和摄像头,通过扫描来获取车辆周边区域的数据,再采用计算机视觉系统来分析数据,从而从中提取道路信号、附近车辆及车道目标物。
自动驾驶车辆务必始终了解其处于成熟驾驶路径中的哪条车道上,包括:所有必要的车道变动。为此,我们采用LANENET,后者是自动驾驶汽车圈内使用范围较广的程序库。
状态观测器
状态观测器将协调所有车载传感器的数据输入值,确保车辆始终处于在最新版的高清地图内。为此,该类状态观测器通过接收车辆不同部件发来的数据输入值,然后再整合该类数据。
不同的情境可能会偏重不同类型的传感器。举个例子,若车辆在隧道内行驶,GPS信号可能不太稳定,该状态观测器可能会依赖激光雷达、雷达等其他传感器及轮胎的动能来更新车辆的地理定位。
同时,在高速公路(或英国的高速公路)上行驶时,在前方行驶的卡车或许会遮挡车载激光雷达,阻止其感知车辆外部的环境。在这种情况下,我们的自动驾驶车辆将像瞎子一样,无法感知周边环境。
但若有可靠的高清地图及GPS信号的辅助,我们的车辆就能非常清楚地了解到其前方的路况(确定是在下个路口还是在下下个路口驶离高速)。
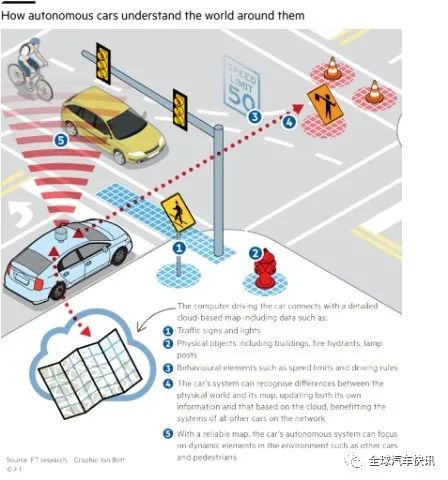
自动驾驶车辆是如何理解其周边世界/环境的?
车载计算机负责驾驶车辆,车载系统与云端相连,可获得详细的、基于云端的地图数据,包括以下数据:
交通标志和交通灯
实体目标,包括:楼宇、消防栓和路灯柱
行为要素,如:限速和驾驶规范
车载系统可识别真实世界和地图间的差异之处,然后同时更新本地和云端的地图信息,使得网络中的其他车辆也能因此而受益。
凭借一份可靠的地图,车辆的自动驾驶系统可聚焦于环境中的动态要素,如:其他车辆和行人
最后,状态观测器将接受自动驾驶车辆的多个车载传感器所发来的数据并将其融合。所有车载传感器的数据发送频率并非完全一致。激光雷达每毫秒可提供许多次脉动(pulsations),而GPS的更新时间略长。状态观测器可将不同输入数据的数值相统一。
运动规划器
运动规划器是一个大型的算法数据集,其将基于车辆的行驶路径发挥作用。运动规划器负责动作。若我们旨在令一辆自动驾驶车辆从A点行驶到B点,首选方案可能是向前开(或是倒车亦或是转向)。
运动规划器负责确定车辆抵达目的地所需采用的操作。该部件将帮助车辆了解障碍物将于何时阻挡车辆的去路,而运动规划器则要求进行紧急刹车。当车辆需要变道时,运动规划器将要求做出切换车道的操作。
当沉浸到自动驾驶车辆的世界中时,上述内容是需要考虑的基本概念。在自动驾驶车辆的研发过程中,尽管我们还需要考虑诸多程序库、算法、车辆架构,但您现在应该对自动驾驶车辆的自动化打造有了一个基础的了解了吧。(本文为编译作品,所用英文原文和图片选自builtin)


-
加强数据安全管理迫在眉睫!“泄密”的汽车将被终结?2021-08-25
-
自动驾驶车辆挑战难度远超我们想象!2021-08-24
-
国家北斗导航位置服务数据中心宁夏分中心在银川揭牌2021-08-23
-
混合动力汽车产业链全景梳理及区域热力地图2021-08-23
-
杭州国资投资30亿元 零跑汽车公布新一轮融资数据2021-08-22
-
五部门发布汽车数据安全管理规定,特斯拉蔚小理百度滴滴还好吗?2021-08-20
-
10月起施行!五部门发布《汽车数据安全管理若干规定(试行)》2021-08-20
-
国家互联网信息办公室等发布《汽车数据安全管理若干规定(试行)》2021-08-20
-
官方出手!五部门:汽车数据不得违规向境外提供重要数据2021-08-20
-
MIT研发深度神经元网络 旨在解决自动驾驶车辆的网络安全问题2021-08-20
-
五部门:减少对汽车数据的无序收集和违规滥用2021-08-20
-
OPPO公开车辆灯光控制专利2021-08-18
-
警方通报蔚来自动驾驶事件:追尾前方施工车辆致亡,已派专员开展调查2021-08-18
-
警方回应“萌剑客”蔚来车祸:事故路段相对比较平直,蔚来没有删改数据2021-08-18
-
官方通报“蔚来自动辅助驾驶车祸事件”:撞击前方施工作业车辆致亡2021-08-18