
五部门关于开展2024年新能源汽车下乡活动的通知
车用雷达市场火热,4D成像之争一触即发!
来源:新能源汽车网
时间:2021-07-26 10:07:32
热度:
车用雷达市场火热,4D成像之争一触即发! 文︱立厷 图︱网络未来几年,汽车雷达市场将以11%的CAGR增长,在主流的毫米波雷达芯片组市场,英飞凌和恩智浦
文︱立厷
图︱网络
未来几年,汽车雷达市场将以11%的CAGR增长,在主流的毫米波雷达芯片组市场,英飞凌和恩智浦几乎占比高达7成,其他厂商份额很小,包括排名三四的德州仪器(TI)和意法半导体(ST)。2020年初,英飞凌宣布与首创车载4D高清点云成像雷达的美国傲酷(Oculi)合作,决定杀入汽车级成像雷达市场,不过还没有发布相应产品,而抢占制高点——4D成像的狙击战已经打响。
汽车变革迎来雷达高增长
过去十年,雷达产业已经是一个很大的市场,预计到2025年CAGR将达到5%,看似不高,但“今天雷达在各种应用中都是不可或缺的工具。在军事领域,对更强生存能力、低拦截概率和更长探测距离的需要已将该产业导向使用固态技术的有源天线阵列,”Yole射频器件与技术业务分析师Cedric Malaquin说。
Yole发布的《2020年雷达产业态势报告:厂商、应用与技术趋势》指出,用于汽车应用的雷达已成为标配,随着测试场景日益严苛,能够更准确地描述车辆前后方场景的成像雷达需求持续增加;车辆中各种传感器融合的数量也在与日俱增。
在Yole市场分析师看来:“对业界游戏规则改变最大的变革之一是借助消费电子市场渗透而产生的HMI(人机接口)对雷达的影响,在这一市场中集成和分辨率最具挑战性,当然,这需要大量的计算和软件。”
Malaquin表示,汽车市场预期将以11%的CAGR增长,而消费市场的CAGR高达70%。“过去十年中汽车雷达市场显著增长,并将在向ADAS和HAD(高度自动化驾驶)发展的趋势下继续增长至2025年,”他说。
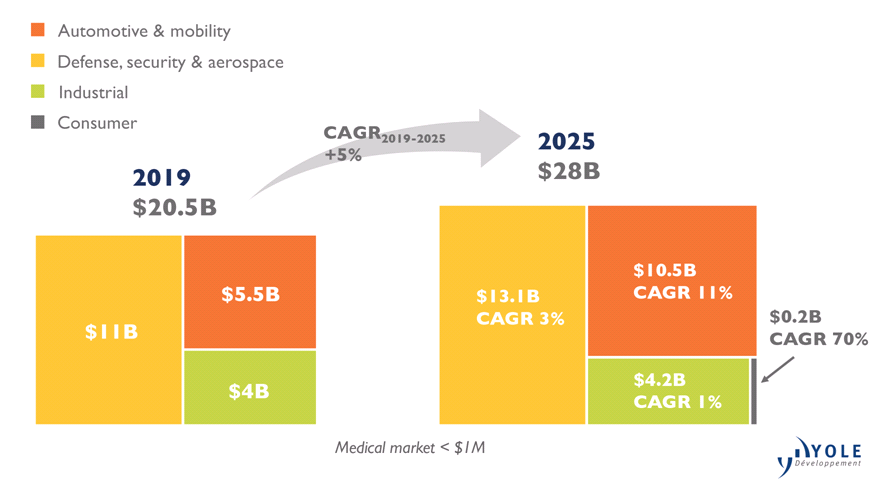
各领域雷达市场预测
随着汽车行业向电动化、网联化、智能化和共享化方向迈进,对雷达性能提出了更高的要求。4D成像毫米波雷达就是顺应大趋势的创新产物。
4D成像雷达优势何在?
从物理学角度看,时间是第四维度,因为时间元素是从多普勒得到的。成像雷达实际上创造了一个阵列,可使测量密度急剧增加。传统2D雷达比较粗糙,每个物体只产生一个点,而成像雷达可以提供许多点,产生的是垂直分辨率,可更好地了解被跟踪的物体是什么东西。
换句话说,时间因素一直是雷达功能的关键。4D成像传感器的第四个要素是横向分辨率。4D成像雷达不仅能识别水平平面,还能识别垂直平面。
又如,一辆汽车在高速公路上以每小时80公里速度行驶,一辆摩托车(低反射率小物体)以每小时200公里的速度从后面驶来。与摄像头和激光雷达不同,4D雷达可以发现最初相距很远的摩托车,并识别出两者在以不同速度移动;还可以显示一个物体是越来越近或越来越远。
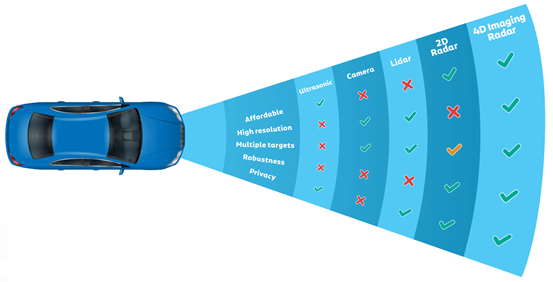
4D成像雷达具备所有传感器优点
总之,4D成像雷达具有以下优势:
实时障碍检测:在所有天气和照明条件下,以广阔视野提供高分辨率环境图像,实时发现各种障碍,包括路边较小的目标,如人或自行车,即使被大物体遮挡也可以确定它们是否在移动。
远距离探测:实现所有传感器中最远距离的探测,最有可能成为第一个发现危险的设备。然后,它可以将摄像头和激光雷达引导到感兴趣区域,大大提高安全性能。
路径规划:提供真正的路径规划,因为它可以在超过300米范围内创建道路的详细图像,并捕捉汽车周围物体的大小、位置和速度数据。
物体高度分离:识别出汽车正前方对着的物体是否(如桥梁)静止,是否必须停下来或者可以安全行驶过去。
降低处理和服务器需求:由于只将摄像头和激光雷达对准感兴趣区域,利用高质量的雷达后处理将解决当前原型的主要问题——功耗。
大幅降低生产成本:即使在L3以上,也无需为每辆车配备一个以上的激光雷达单元,或者可能根本不需要激光雷达,有助于制造商降低成本。
4D成像之争一触即发
2018年底,为了与英飞凌、恩智浦两大厂商竞争,德州仪器提出4D成像毫米波雷达概念,推出基于AWR2243 FMCW(调频连续波)单芯片收发器的4片级联4D毫米波雷达全套设计方案,其中集成了雷达开发商最难搞定的天线,内嵌四元件串馈贴片天线。
AWR2243 FMCW收发器基于TI低功耗45nm RFCMOS工艺,以单片实现具有内置PLL和A2D转换器的3Tx(发)和4Rx(收)系统。用户简单更改编程模型就可实现短、中、长不同射程的传感器,并可动态重新配置以启用多模传感器。作为完整的平台解决方案,AWR2243收发器提供参考硬件设计、软件驱动程序、示例配置、API指南和用户文档。
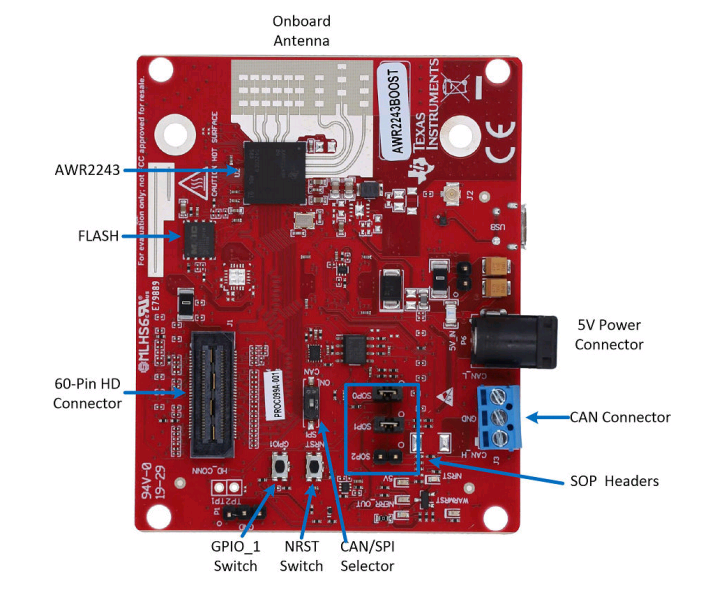
AWR2243评估板
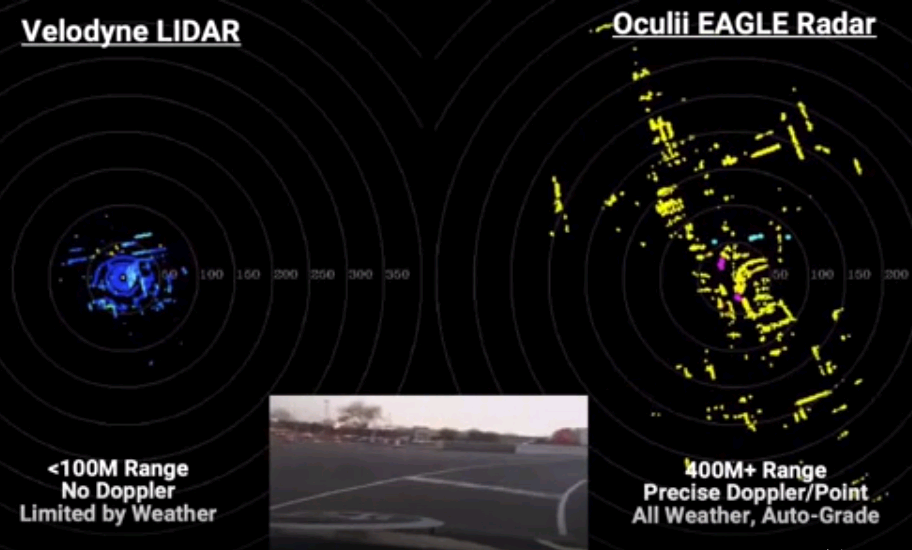
2020年4月,傲酷首创4D点云高清成像雷达,成像效果与16线激光雷达不相上下。4个FOV(视场角)120°雷达可以形成360°环视点云,探测半径可达200米。
2021年3月,傲酷利用软件算法用TI芯片实现了超高角分辨率4D成像前向雷达Eagle,使毫米波雷达探测距离达到350米以上。Eagle用双芯片实现了宽视野范围的高角度分辨率和仰角信息,利用专有AI算法驱动的虚拟孔径成像软件使角度分辨率提高了50-100倍。这种多虚拟天线模式解决了困扰车载毫米波雷达多年来只能用增加实体天线来提高角分辨率的难题,而成本与普通毫米波雷达差不多。
据介绍,Eagle可在120°水平/30°垂直宽视场中提供0.5°水平x 1°纵向角分辨率。其远程和高角度分辨率使其能够用于各种自动驾驶应用,包括高分辨率雷达测绘和定位、自主路径规划和避障、目标检测和跟踪、室内导航、虚拟围栏等。
传统商用雷达与傲酷雷达对比
传统雷达波形是单频、重复、非自适应的,产生多种波形的唯一方法是增加接收天线数量。虚拟孔径成像波形是自适应的相位调制,每根接收天线在不同时间产生不同的相位响应,然后对数据进行插值和外推,以创造一个“虚拟孔径”。使用人工智能从环境中学习和适应的智能软件可以伴随成倍增长的数据而不断改进。
初创公司也在搞事情
半导体厂商与雷达开发商合作开发产品天经地义,也有一些专门研发雷达技术的初创公司在开发雷达处理器和RF芯片组。之前介绍过2015年成立的美国初创公司Uhnder,它将军工科技导入汽车雷达开发出数字4D软件定义成像雷达。
同样成立于2015年的以色列初创公司Arbe Robotics由半导体工程师、雷达专家和数据科学家组成,也一直在苦心钻研汽车应用的新型4D成像雷达,旨在为ADAS系统和未来自动驾驶车辆的激光雷达提供低成本替代方案。
Arbe利用强大的处理技术和先进算法实现超高分辨率,利用数千个虚拟发射和接收通道实现优异的雷达性能。
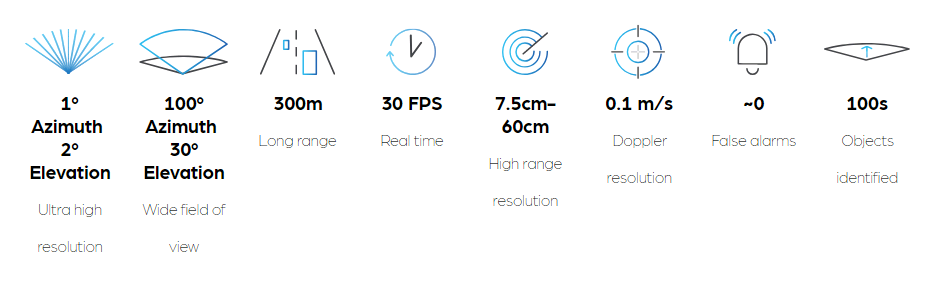
Arbe雷达性能
2019年1月,Arbe发布采用专利芯片组技术的车规级4D成像雷达产品Phoenix,据称其图像清晰度比同类产品清晰百倍,可提供卓越的实时动态、静态目标物分离,适用于各种级别的自动驾驶车辆。Phoenix采用模块化设计,完全可定制,允许主机厂自由缩放分辨率,范围和视野功能满足当前和不断发展的设计规范和成本要求。其感测距离为300米,方位角100°,仰角30°。
2019年9月,Arbe推出首款全新高密度雷达天线,其频道数量、视野宽度和分辨率均达到市场最高数值,能够以卓越能力检测行人,并将其与人行道分离,为ADAS和自动驾驶增加了新的安全保障。
2020年5月,Arbe推出首款汽车专用图像雷达处理器芯片解决方案,能够处理由48收和48发生成的原始数据,每秒生成30帧数据,从而满足汽车功率要求。
2020年10月,Arbe又推出首个2K高分辨率成像雷达开发平台,为客户的成像雷达系统设计带来巨大改变。Arbe的解决方案小巧玲珑,重量轻且功耗低,成本可承受,且完全可定制,可满足所有级别的车辆自动驾驶需求。
2K高分辨率差分方法的最大特点是,无论车速、高度、距离、大小或周围天气和照明条件如何,都能区分真实的威胁和错误警报,以确保驾驶员、行人和其他易受伤害的道路使用者前方的道路安全。
Arbe认为,低空间分辨率限制是导致无法区分威胁和误报警的主要原因,4D成像雷达正在解决这个难题。
Arbe通过高度可靠的目标检测、低旁瓣电平(SLL)和低虚警率实现了距离、方位、仰角和多普勒维度的超高分辨率,几乎没有虚对象出现,消除了假阳性和假阴性场景。除了高精度中心和速度,高分辨率成像还提供被跟踪对象的更详细信息,如方向和边界,有助于与其他传感器的融合。
Arbe利用数字波束成形48发和48收天线创建的2304个虚拟通道阵列,支持每帧100000次以上检测,有目前最高的点云密度。Arbe增加分辨率的方法是利用宽孔径阵列,以低SLL提供1.25°方位角和1.5°仰角的物理3dB波束宽度,提高高动态范围的可靠性和安全性。高物理分辨率和高动态范围具有区分各种物体的能力,如卡车旁的摩托车、桥下的车辆和围栏旁行人或路边的车辆。

静止和运动目标跟踪
Arbe的基带处理器(Everest)是自研的,集成了获得专利的雷达处理单元(RPU)和嵌入式专有雷达信号处理算法,既可保持低功耗,又能实时处理和转换大量原始数据,每秒生成30帧完整4D图像,处理吞吐量达3Tb/秒。Everest处理器包括专用ASIL-D安全岛,用于监督系统的安全运行。连续内置雷达系统自检符合ISO 26262标准。
Arbe开发的专有毫米波汽车级雷达RFIC芯片组包括24发和12收芯片,采用22nm FD-SOI CMOS工艺(22FDX),支持TD-MIMO,在通道隔离、噪声系数和发射功率方面具有同类最佳性能。最新RF处理技术实现了每通道最低成本的先进RF性能。
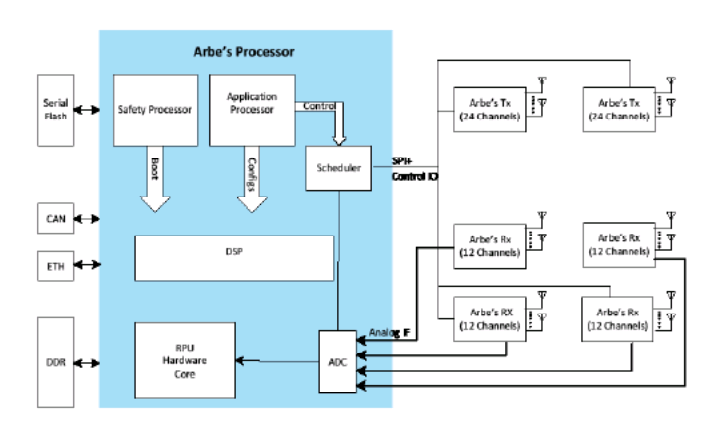
Arbe雷达开发平台
在算法方面,Arbe开发的专有后处理软件栈包括为增强型FMCW TD-MIMO成像雷达优化的基于雷达的SLAM解决方案,实现了实时聚类、跟踪、自定位、假目标过滤和基于雷达/雷达-相机的目标分类。雷达数据后处理有助于跟踪和对车辆整个视野中的目标进行分类,确定其方向和运动矢量,并提供精确和准确的自由空间映射。
现在,使用雷达传感器的车辆越来越多,大多是在同一频段发射,互干扰难以避免,探测漏报或错报可能再次导致事故。Arbe获得专利的FMCW2.0系统创新可有效避免并减轻其他FMCW雷达发射机干扰,使性能下降最小甚至不会下降。
Arbe表示,随着这项技术的进步,有望让雷达从辅助配件升级为从L2到L5安全自动驾驶的核心。
头部厂商不甘坐以待毙
作为行业龙头的恩智浦也加快了与客户合作的步伐。2020年6月,国内毫米波雷达厂商纳瓦电子使用恩智浦的TEF82xx MMIC加SR32 MCU推出了4D成像雷达,据说比国外某厂商的产品性能提高两倍,比国内2022H2 SOP的产品性能提升一倍,且量产早了18个月。
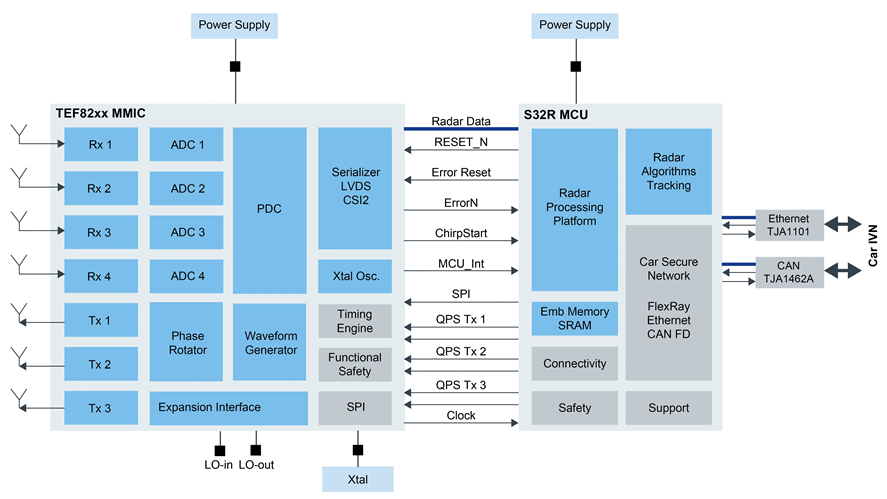
恩智浦4D成像雷达框图
纳瓦7GHz CMOS毫米波雷达用MIMO天线技术与ESPRIT(利用旋转不变性技术估计信号参数)超分辨率算法相结合,采用复杂调试来提高抗干扰性;利用数字波束赋形和单脉冲解模糊提高角度精度和分辨率;用DBSCAN(基于密度的含噪声应用空间聚类)算法与非线性卡尔曼滤波跟踪算法结合精准计算目标航迹。
纳瓦NOVA77GF-B 4D成像雷达
值得一提的是,在纳瓦的产品中,既有恩智浦的芯片方案,也有TI的方案,还有总部位于上海张江的加特兰微电子(Calterah)的芯片,只不过用途分别是角雷达、舱内雷达、尾门雷达、前向雷达。而且,在新产品中也有国产芯片的身影,值得点赞!
加特兰4发8收77/79GHz雷达芯片
为了狙击TI,6月初,恩智浦推出基于台积电16nm工艺量产两款车用芯片——汽车网络处理器S32G2和雷达传感器芯片组S32R2949。
S32R294可以处理4D点云雷达信号,将为主机厂提供扩展性解决方案所需的效能,包括先进转角雷达、长距离前置雷达和先进多模式使用场景,如同步盲点侦测、变换车道辅助和仰角感测等。
特别是,S32R294与恩智浦上一代芯片S32R274尺寸一致,芯片外观尺寸是7.5mm×7.5mm,但其性能提高了一倍。它可以实现超分辨算法、信号聚类、目标追踪、决策等功能。目标级数据和决策指令通过CAN FD接口输出到后端车身控制单元或ADAS域控制器。
这款6发8收毫米波雷达最多支持2片芯片级联,其两路MMIC是上面提到的TF82系列,通过LO相连实现芯片间同步。MMIC芯片的波形是由MCU通过SPI配置通道控制其波形发射。接收链路接收到的中频信号也是通过MIPI-CSI接口传输回MCU做后续处理。
这表明恩智浦的雷达芯片非常灵活,可以处理从低端到高端的所有应用。雷达接收的通道数越多,其视场角就越宽,可以实现横向防撞预警、代客泊车、4D点云成像等高级辅助驾驶功能。
软件定义雷达大有可为
可以看到,现在雷达的趋势是收发器越来越多,而一些公司也在利用软件算法以虚拟孔径来增加更多通道。虚拟孔径技术的确是MIMO雷达的黑科技,目的是提高信噪比,也就是提高雷达的检测能力,但又不大幅增加成本。这么好的方法,必然也有代价,如何将发射分开,防止波形互相干扰是有难度的。
另外,如果雷达厂商有自己独到的软件技术,也可以将芯片(硬件)的性能再度提升。究竟是采用传统半导体大厂的技术,还是选择后起之秀的方案还真是难以抉择。


-
全球芯片短缺对美国车企造成怎样的冲击?2021-07-24
-
斯柯达与丰田汽车生产受芯片短缺影响2021-07-23
-
因芯片短缺,通用汽车大幅削减北美大型皮卡产量2021-07-22
-
通用因芯片短缺暂停大部分卡车生产2021-07-22
-
拜登团队称看到芯片供应短缺缓解迹象,对汽车制造商供应逐渐增加2021-07-21
-
【追踪报道】芯片荒席卷全球 车企相继减停产 “龙卷风”何时停?2021-07-20
-
芯片算法双爆发,但华为高管却表示L5自动驾驶永远达不到2021-07-19
-
芯片短缺影响新车市场,二手车市场迎来爆发期2021-07-13
-
受芯片供给不足影响,上半年汽车产销增速大幅回落2021-07-12
-
中国成为受汽车芯片短缺损失最严重的国家,该如何破局?2021-07-02
-
5月全球车市:亚洲芯片短缺致产销双下降,英国销量暴涨7倍2021-07-01
-
车规级芯片产能不足,下半年买车会造成你的亏损吗?2021-06-26
-
新能源汽车携产业链攀升 磁元件如何“捆绑”住芯片2021-06-24
-
星途多管齐下,突破芯片产能不足产生的问题!2021-06-21
-
芯片短缺对新能源物流车的影响大吗?2021-06-17