
五部门关于开展2024年新能源汽车下乡活动的通知
MCU为电动自行车提供有效的驱动
来源:新能源汽车网
时间:2016-06-13 19:14:59
热度:
MCU为电动自行车提供有效的驱动 CD/DVD播放器和电脑制冷风扇到工业机械以及包含混合动力汽车、著名的Segway电动滑板车和许多其他电动滑板车、电力驱动的自行车(或称为“电动
CD/DVD播放器和电脑制冷风扇到工业机械以及包含混合动力汽车、著名的Segway电动滑板车和许多其他电动滑板车、电力驱动的自行车(或称为“电动自行车”)在内的电动交通工具,无刷直流电动机正在各种领域中取代整流式电动机。由于它们越来越普及,特别是在亚洲,这样的“个人运输设备”向制造商描绘了巨大的潜在市场,并且可能有助于降低全球的能源消耗。
即使北美市场也显示了采用电动自行车的可能性。自2000年8月以来,由加利福尼亚州圣克鲁斯的县区域性运输委员会资助的一项活动对居民购买电动自行车予以部分退款。由Ecology Action进行的一项调查显示,62%的活动参与者从只驾驶单乘客的汽车转变为平均每周骑电动自行车行驶24~28英里。
尽管这种情况可能是独一无二的,但它说明了电动自行车的实用性和效用是怎样减少个人汽车旅程,并进而减少交通拥挤,停车场需求以及空气污染的。如果将这种经验在整个美国推广,影响可能会非常大。根据环境保护局的说法,在美国,人们每天大约进行9亿次汽车旅行,其中一半路程少于5英里而且只乘载了一位乘客。
电动自行车部件
基本型电动自行车通过由电池供电的无刷直流电动机来驱动,并由电子控制设备(ECU)进行控制。无刷直流电动机之所以受欢迎,是因为它们运转快、无噪声、效率高,而且展示了比整流式电动机更长的工作寿命。无刷直流电动机中传送的力矩和电动机尺寸的比值比其他电动机要高,这使得它们非常适用于对体积/重量要求比较高的应用。
无刷直流电动机所需要的基于MCU的控制器通常受限于应用的要求,但是常见的例子是用于电动自行车的控制单元。这项应用不仅需要波形因数小,而且对成本的要求也特别高。
基本型电动自行车在设计上是简单的。它的后轮由三相无刷直流电动机驱动,额定功率通常在几百瓦。电池的电压通常是36V或者48V,而ECU包含了几乎所有电子装置(参见图1),包括MCU、电动机逆变器、温度传感器、故障检测、SMPS以及I/O。这些电子装置通常安放在明信片大小的单元内,而且对热性能和耐用性有很高的要求,这些都为设计者提出了许多难题。
设计难题
成本敏感性、零件数量以及整体功能的难题可以通过使用功能强大但价格低廉的8位微控制器来解决,例如,英飞凌公司的XC866。ECU设计人员应当寻找每个机器周期两个时钟的增强型8051芯片(而不是标准的12),它提供了更强的计算效率,更快的执行速度以及增强的最大时钟速率,并且,它可以在较低的晶振速度下完成相同的工作,在不牺牲性能的情况下降低能源消耗。
为了适应电动机控制的算法,嵌入式闪存大小的要求可能在4~16KB之间。MCU的电动机控制外设可能包含一块脉宽调制电路,通过可以预编程以自动执行任务的捕获/比较单元(CCU)来实现,它有助于减小代码大小以及CPU的负荷。此外,CCU可以连接到8通道10位ADC来提供硬件事件驱动的触发,来提供无须传感器的控制功能。
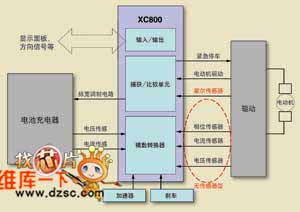
电动自行车控制单元驱动三相无刷直流电动机
无传感器型控制
无传感器型的控制在要求低成本和高可靠性的应用中是很重要的,比如在电动自行车以及暴露在户外自然环境和严峻温度之中的其他应用。无刷直流电动机应用中常用的霍尔传感器非常容易受这些因素的影响,而且长期暴露在这种环境中会使可靠性明显降低。
但是,在考虑转换到无传感器型BLDC电动机控制时,设计人员面临着如何使无传感器型系统满足需要的性能水平的难题。与这一点有最密切关系的是启动电动机,因为无传感器型控制是基于反电动势的,而反电动势只有在电动机旋转的时候才存在。
对于带有脚蹬的电动自行车而言,这个问题并不严重,因为骑车人可以在电动机达到需要的速度之后再激活电子控制。但是在没有脚蹬的电动自行车中,必须要配备从熄火状态启动电动机的算法。
由于难以预知的情况,传统的强迫换流启动办法通常不适用于无传感器系统,因此制造商通常会使用结合几项技术的方法来启动电动机。例如,因为在启动电动机之前不知道转子的位置,所以可以使用预设相位来确定转子的位置或者将转子放在确定的位置。
一旦转子位于启动位置,可以向电动机应用加速表,以探测反电动势的过零点信息。如果微控制器探测到预定数量的过零点事件,它就可以切换到自动换流模式。这需要执行大量的算法。
考虑因素
有些应用的性能要求会需要用到运动传感器;在这种情况下,将需要最小软件开销的换流模式内置在CCU中是非常有帮助的。
另一项主要的考虑是从反电动势探测或者从同步失败中恢复的能力,这些可能会发生在碰到障碍物之后等情况下。同样,为了解决这个难题,需要使用结合算法,这使得微控制器的可配置型成为一项重要的因素。通过在自管理型外设中执行尽可能多的任务,MCU可以减轻CPU的负担并减少需要的代码空间。这两者都会产生更耐久、更节省成本的设计。
无论是带有还是没有传感器的设计,都可以通过PWM实现各种“梯形”换流方法来驱动BLDC。在梯形换流方法中,电流都是通过每次使用一对电动机端子来控制的,而电动机的第三个端子在电气上总是与电源断开的;也就是说,在任意给定的时间,只使用了三相中的两相,而第三相是悬空的。
在“慢衰变”调制方法中,在PWM关闭的时段内,负载电流可以在底部开关和体二极管之间流通。
相反,在“快衰变”方法中,PWM关闭时段内所有的开关都将断开,但是这种方法存在高负载电流尖峰的缺陷。为了弥补这种缺陷,可以使用同步整流,让负载电流在开关本身中流通,而不是在体电阻中。这需要同时调制同一个电桥的顶部和底部开关,而不仅仅是顶部开关。
但是,必须谨慎,以避免转换期间电流的直通短路。通过在电路切换过程中插入无效时间,电流将通过体二极管。但是在无效时间之后电流将流过底部开关,因此同步整流可以用于快衰变。对于使用分立功率器件而不是带有内置保护电路的集成驱动器的低成本设计而言,在MCU的PWM中可以使用上述模式是至关重要的。将这些模式和故障检测等其他功能结合使用,可以为分立逆变器驱动提供高层次的保护功能。
在设计和算法的开发完成之后,制造商需要确保自己的知识产权受到保护。这可以通过防止无授权获取代码的特殊功能来实现。这一点是非常重要的,因为电动自行车驱动是由相对普通的驱动结构组成的,产品之间主要的差别在于软件。
详情,请登录维库电子市场网(www.dzsc.com)
来源:ks99


-
常州纯电动汽车:重大利好 高速电动出行2023-11-30
-
插电混动和纯电动汽车孰好孰坏2023-11-30
-
基于PSoC的电动自行车控制器的设计2016-06-13
-
电动自行车控制器的技术原理解析2016-06-13
-
电动自行车充电器的干扰分析和应对措施2016-06-13
-
电动自行车KGC充电器电路原理解说(上)2016-06-13
-
电动自行车充电器11个故障如何快速检修2016-06-13
-
电动自行车常用特殊晶体管与代换2016-06-13
-
基于AT89C51的电动自行车快速充电器设计2016-06-13
-
巧修电动自行车的“断格”电池2016-06-13
-
科斯达电动自行车充电器简介与检修实例2016-06-13
-
电动自行车KGC充电器电路原理解说(下)2016-06-13
-
基于MSP430x09x MCU的电动剃须刀系统设计2016-06-13
-
奥地利微电子推出电动自行车锂电池2016-06-13
-
电动自行车锂电池组保护电路设计2016-06-13