
五部门关于开展2024年新能源汽车下乡活动的通知
基于AVR的铅酸蓄电池管理系统设计
来源:新能源汽车网
时间:2016-06-15 08:01:16
热度:
基于AVR的铅酸蓄电池管理系统设计 1. 引言 在工业过程或实验室里,经常需要对多种信号进行同时采集及监测,以便实现性能分析、过程控制、系统恢复等目的。目前,常用的数据采集装置
1. 引言
在工业过程或实验室里,经常需要对多种信号进行同时采集及监测,以便实现性能分析、过程控制、系统恢复等目的。目前,常用的数据采集装置,多采用单片机实现,软件多采用单任务顺序机制,这使得系统不仅处理能力有限,而且存在稳定性差的问题。以嵌入式计算机为核心的嵌入式系统由于具有体积小、性能好、功耗低、可靠性高以及面向行业应用的突出特征,成为继 I T网络技术之后,又一个新的技术发展方向 [1]。
本文以嵌入式 S3C2410为核心芯片,设计和实现了一种高速、高精度且具有一定处理能力的数据采集处理系统,并将其应用于工业过程水位和温度的实时监测。
2. 系统总体设计
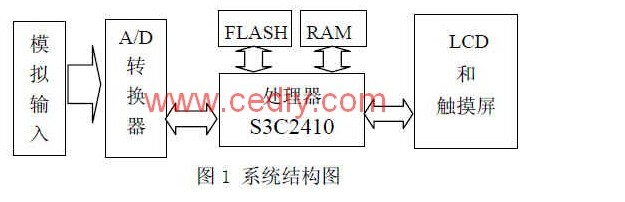
本设计采用以 ARM9为核心的 S3C2410作为数据采集与处理的核心,主要包括以下四个模块:信号采集、数据存储、数据显示、数据传输。模拟信号通过放大电路再输入到 S3C2410处理器片内 A/D转换器,经过处理结果以动态波形的形式显示在 LCD上,并用触摸屏控制显示方式。同时通过串口发送给 PC,在 PC上用 VC++编写的程序对数据进行显示、存储等后续处理。系统结构如图 1所示。
3. 硬件电路设计
温度和水位的测量用的是变送器。以温度变送器为例,本系统选用的是北京赛亿凌科技有限公司的 STY系列一体化温度变送器,它的测量范围是 0~150℃,它的输出是一个与被测温度成线性关系的 4~20mA的恒流信号。
为了满足测量要求,在温度变送器的两个输出端之间接一个电阻,使其输出的电流信号转换成电压信号,考虑到 S3C2410内部 A/D转换器的输入范围是 0~3.3v,因此选用 165 Ω的电阻。电路连接图如图 2所示。
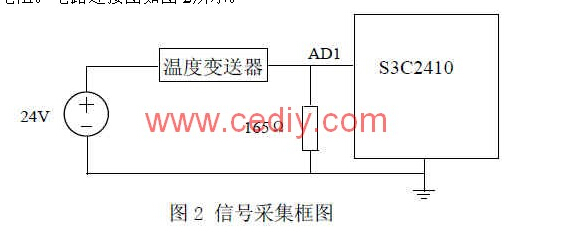
由图 2可知,温度变送器产生的 4~20mA电流信号,经电路转化变成了 0.66~3.3V的电压信号,此电压信号传递给 S3C2410内部的 A/D转换器。采样温度值可以这样计算,设采样得到的电压值为UT,单位为 V,对应温度为 T,单位为℃,则 T的值可由式( 1)求得:

4. 系统软件设计
软件设计主要是 uC/OS-II移植和任务的编写。uC/OS-II是一个免费的、可裁减、源码开放、结构小巧、抢占式的实时多任务嵌入式内核,主要面向中小型嵌入式系统,具有执行效率高、占用空间小、可移植性强、实时性能优良和可扩展性强等特点[2]。
为了方便移植,绝大部分 uC/OS-II的代码是用 ANSI C语言编写的;但是仍需要用 C语言和汇编语言写一些与处理器硬件相关的代码,这是因为uC/OS-II在读/写处理器寄存器时,只能通过汇编语言来实现。与处理器相关的代码包括 OS_CPU.H、OS_CPU_A.ASM和OS_CPU_C.C三个文件,所以移植的主要任务就是修改这三个文件。
(1) 在修改 OS_CPU.H中与处理器和编译器相关的代码时要注意几点 [3]:
(a)不同的处理器有不同的字长,uC/OS-II为了确保其可移植性,不使用 C的int,short,long等数据类型,因为这些数据类型是与编译器相关的,是不可移植的。
(b)修改 OS_ENTER_CRITICAL()和OS_EXIT_CRITICAL()两个宏。uC/OS-II需要先禁止中断再访问代码的临界区,并且在访问完毕后重新允许中断。OS_ENTER_CRITICAL()的功能是关中断,在 S3C2410上通过 OS_CPU_A.ASM中的 INTS_OFF()函数来实现。OS_EXIT_CRITICAL()用于开中断,通过 OS_CPU_A.ASM中的INTS_ON()函数来实现。
(c)OS_STK_GROWTH用来定义堆栈生长方式, 置 0表示堆栈从下往上增长,置 1表示
堆栈从上向下增长。而在本设计中使用的是堆栈从上向下增长 S3C2410处理器,所以置1。(d)OS_TASK_SW()是一个任务切换宏,用于从低优先级任务切换到高优先级任务。它将任务切换函数OSCtxSw()封装起来。
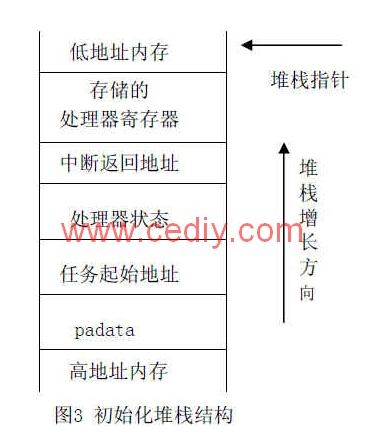
(2) 修改OS_CPU_C.C中与操作系统相关的OSTaskStkInit()函数
OSTaskStkInit()用于任务堆栈初始化,OSTaskCreate()和 OSTaskcreateExt()通过调用OSTaskStkInit()来初始化任务的堆栈结构。图 3显示了OSTaskStkInit()在建立任务时,任务堆栈初始化的形式。
(3) 编写OS_CPU_A.ASM中4个与处理器相关的函数
OSStartHighRdy( )在程序中被 OSStart( )函数调用,作用是使就绪任务中优先级最高的任务开始运行。 OSCtxSw()是任务级的任务切换函数,通过执行软中断指令,或者依据处理器的不同,执行TPAR(陷阱)指令来实现。OSIntCtxSw()是中断级任务切换函数,通过调用它,可以在 ISR中执行任务切换功能。OSTickISR()为 uC/OS-II提供一个周期性的时钟源,来实现时间的延迟和超时功能。
5. 应用任务设计
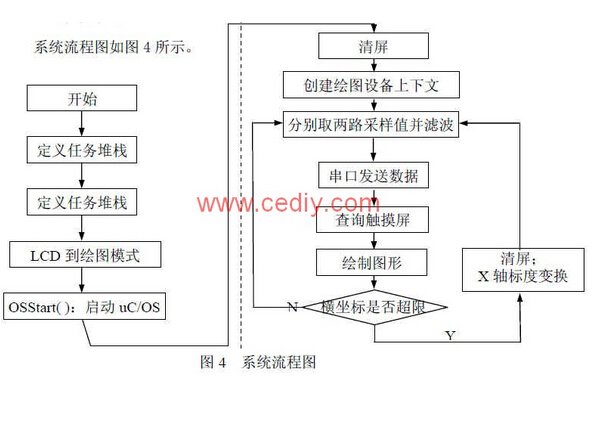
系统流程图如图 4所示。
(1) 初始化uC/OS-II系统环境
图 4的左半部分所完成的功能是启动操作系统,并创建 Main_Task和 tch_Task两个任务。右半部分是 Main_Task()和 tch_Task()的主要内容,这是本设计的重点部分。模拟信号的采集,显示是在 Main_Task()中完成的,而对显示方式的控制是由tch_Task()来完成的。
(2) 编程实现 A/D转换
模拟数据的采集是在 Main_Task( )中通过调用函数 void init_ADdevice()和 intGetADresult(int channel)实现的。模拟信号经 A/D转换后的一个 10位数字量,通过式(1)
(2)中将其转换成实际的数据。式中的 3.3表示模拟量的上限值,1023是经(2 10-1)计算得来的,经计算后的数据就是实际的模拟量值。数据经滤波后分别存放在两个变量中,用于下面的绘图部分程序。
(3) 触摸屏控制程序
这一部分程序的思想是:若有触摸动作,取触点坐标值,判断其是否属于 LCD上显示的控制按钮的坐标范围,若是则做出相应的控制调整,若否则无动作。返回触点坐标的子函数为 TchScr_GetScrXY(int *x,int *y)。在本设计中,定义了 3个控制按键,它们用于传递控制信息。
(4) 绘图的API函数
在uC/OS-II系统环境下,绘图必须通过使用绘图设备上下文(DC)来实现。绘图设备上下文(DC)中包括与绘图相关的信息,如:绘图坐标、画笔颜色、画笔宽度等等。在实际使用时,使用CreateDC()创建绘图设备上下文,使用DestoryDC(pdc)删除绘图设备上下文,这两条语句在程序中应该成对出现。通过使用 LineTo( )、TextOut()、Circle( )、MoveTo( )等函数,可以将采样值实时的显示到 LCD上。
在 LCD绘图时以下两点值得注意:
(a)在 LCD绘图时要反复使用 LineTo( ) 和MoveTo( )两个函数,但在使用该函数之前,一定要注意到 LCD的分辨率。只有知道了 LCD分辨率,才能知道 LCD的坐标值的范围,从而得到正确的设定结果。本设计使用的 LCD分辨率是640*480。也就是说,初始坐标系的 x值范围为(0≤x≤640),y值范围(0≤y≤480)。
(b)由于LCD宽度有限,当横坐标 x>LCDWidth时,波形就超出显示范围了。解决方法是在 LCD上显示自左至右画出的波形,当画到 LCD的最右端时,清一次屏幕后,重新从 LCD的左端向右画线,同时横坐标的值也相应的改变。
(5) PC机上数据显示程序
为了更好的记录和分析数据,我们在 PC机上用 VC编写了程序,这样可以很好保存和处理数据,为性能分析和系统故障恢复提供了有利条件。
6.结论
uC/OS-II实时操作系统是开放源码且得到实际验证的软件平台,而ARM处理器具有强大的32位RISC性能。基于uC/OS-II及ARM,能大量减轻研发任务,提高研发速度,为在短时间内设计出控制性能优秀的数据采集系统创造了条件。本文数据采集系统已成功应用于工业场合温度和水位的实时测控,达到了很好的效果。
本文作者创新点:摒弃了传统单片机数据采集,采用移植性好的嵌入式 uC/OS-II系统,具有后续开发简单,系统稳定性好,可靠性高等特点。本设计可以很容易得移植到其他数据采集系统当中去。参考文献
[1] 田泽.嵌入式系统开发与应用教程[M].北京:北京航空航天大学出版社,2005.
[2] 任哲.嵌入式实时操作系统 uC/OS-II原理及应用 [M].北京:北京航空航天大学出版社, 2005.
[3] Jean J. Labrosse,邵贝贝等译.嵌入式实时操作系统 uC/OS-II[M].北京:北京航空航天大学出版社,2003.
[4]马云辉, 姚宇翔. uC/OS-Ⅱ在 LPC2214上的移植与应用 [J].微计算机信息,2008, 4-2:68-70
[5]吴绍根.uC/OS-II在 LPC2210上的移植实现 [J].微计算机信息,2007,3-2:62-64
上一篇:变频器与电动机电路中可否装接触器


-
甘肃省新能源汽车推广应用实施方案(2016—2020年)2023-11-30
-
混合动力汽车的六大关键技术2023-11-30
-
混合动力车优缺点2023-11-30
-
混合动力汽车动力系统有缺点对比分析2023-11-30
-
燃料电池汽车前景如何2023-11-30
-
【安全】燃气汽车加气站建设的安全要求2023-11-30
-
燃气汽车的日常维护2023-11-30