
五部门关于开展2024年新能源汽车下乡活动的通知
交流伺服电动机中的滤波器
来源:新能源汽车网
时间:2016-06-13 19:13:23
热度:
交流伺服电动机中的滤波器 交流伺服电动机的应用已很普遍。国内先从控制器开始开发,再到驱动器,现在也有类似的电动机出现在市场上。随着技术完善,价格降低,控制性能的提高,操作调试日趋
交流伺服电动机的应用已很普遍。国内先从控制器开始开发,再到驱动器,现在也有类似的电动机出现在市场上。随着技术完善,价格降低,控制性能的提高,操作调试日趋简单,以及系列化、模块化不断发展,用它取代其他类型的伺服控制电动机已成一种趋势。
直接驱动电动机(d-d motor,dynaserv)因其不需要减速器而在某些特定场合得到广泛的应用,相当于我们称作的力矩电动机,只不过前者是用新型的交流电动机原理,是数字控制式的。现用横河公司(yokogawa)的智能驱动器drvgⅲ为例介绍它的滤波器。该驱动器为较新型的型号,可以较全面的概括其他型号的用法。
振荡类型
不稳定现象主要有下列几种:
1)调整振荡
低频振荡,频率几赫兹,振荡幅度几度到几十度,有时超出控制区。由位置控制频率带宽和速度控制频率带宽失衡引起,如速度控制频率带宽小于位置控制频率带宽3倍。也可以是自动调整时惯量力矩值不合适,如大于1.5倍时。可以反复执行自动调整操作并检查惯量值,其误差不能大于20%。或降低#0参数设置值(伺服刚度设置参数)。
2)爬行
振动现象类似于调整振荡。当执行低速运行指令时,反复一走一停,是静摩擦力大于低速时的动摩擦力导致。原因是位置积分限制值太大,位置偏差太大从而使控制系统不稳定。方法是调整“积分限制值”或增加系统刚度。
3)相移振荡
振荡频率为几十到200hz,振荡幅度不低于几十度。原因是速度输出信号相位落后于速度输入信号相位180°,由控制理论可知这时系统无稳定裕量。当各种滤波器使用相同的频率或速度控制带宽和滤波器频率带宽相同时都可引起这种振荡。处理方法为降低#1参数设置值(伺服刚度设置参数)。
4)谐振
振荡频率为几十到2khz,振荡幅度顶多几度,依结构而定。振幅小而频率高,常可听到震颤噪音,系统刚度小易引起这个现象。引起原因是负载的机械谐振扰动进入速度控制环,多数情况下有几个谐振频率。所以设计系统时机械谐振频率应尽量高,至少要高于系统控制带宽5倍以上,结构设计时注意刚性设计,避免细长杆结构。可调整滤波器抑制频率谐振点增益来解决。
滤波器
为消除振荡有三种滤波器。根据具体情况选用。
a.相位滞后补偿滤波器
为一阶延迟滤波器,由于它可调节带宽的频率,增加阻尼,在减少相移上优于速度反馈滤波器。
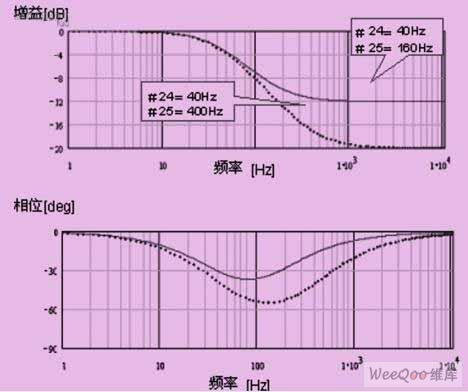
图1 相位滞后补偿滤波器bode图
由图1的bode图可看出它比速度反馈滤波器多一个一阶微分环节用于补偿相位损失,参数#24对应积分常数,参数#25对应微分常数。并且最大增益衰减点频率可设置,使相位滞后减到最小。另外,相对于陷波滤波器,它对抑制频率范围宽的谐振效果好,因其幅度抑制值小,对峰值高频带窄的谐振不合适。
注意如果速度控制带宽和一阶补偿滤波器的频率设置太接近容易引起振荡。
b.陷波滤波器
陷波滤波器又称为带阻滤波器,可对任意频率信号有效地阻断,甚至可使谐振点的增益降到零。当谐振峰值高而频率带宽窄时适用。通过改变品质因数(q值)使衰减特性变化急剧或平缓。频率设置范围从50~1500hz,q值设置范围从0.5~2.5(默认值1.5)。图2示出了陷波滤波器设置图。
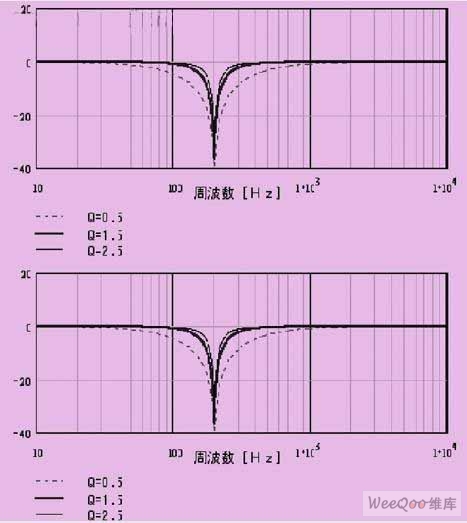
图2 陷波滤波器设置图
在谐振频带太宽时该滤波器不能滤除干净。
c.速度反馈滤波器
速度反馈滤波器也为一阶延迟滤波器,这是一个纯粹的惯性环节,相移趋于90°。在高频时增益小,当高频处有几个谐振点时适用。增益在-3db规定为带宽频率,设置范围从50~1000hz(见图3)。注意使用时相移可到90°,可能会发生相移引起的振荡。
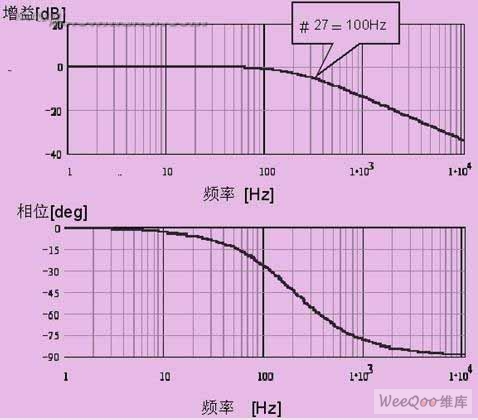
图3 速度反馈滤波器bode图
调试设定步骤
1. 先调陷波滤波器1和2使其振荡值到最小,如果无效果就关闭该滤波器。
2. 再调整相位滞后补偿滤波器。
#24= n×#2
#25= 4×#24
参数#24为一阶滞后补偿频率#1;
参数#25为一阶滞后补偿频率#2;
参数#2为速度控制带宽#1。
设置参数#24用n=3,n=2,n=1来试,不能使振荡停止就关闭该滤波器。
3. 减低参数 #1的值(伺服刚性设置)。返回到步骤1。反复调整直至满意。
若自调整时出错,可将负载惯量设置为零,并增加自调范围(参数#51,自调模式执行范围)。若自调整时振荡则降低伺服刚度直到谐振停止。再重复执行自调整,滤波器调整。
各种型号的这类电动机和驱动器均有它自己的调试、控制和设置参数的软件界面,或对控制器,或对驱动器,但都大同小异,这里不做介绍。在调试的过程中须反复实验观察,根据使用要求灵活应用。例如在对一个由这类电动机构成的转台测试设备,测量时对转速稳定要求严格,而对加速度并不做严格要求,只要加速区不是太长就行,被测对象种类较多,重量、惯量、刚度各不一样,并且更换被测对象频繁。使用自动调整,在加载,空载,或换负载对象时常发生谐振,要重新执行自动调整才行。为此笔者将系统增益降低,使输出特性硬度减低,牺牲快速性而增加稳定性,使各种负载时均不振荡也不降低测量精度。在另一套系统中笔者甚至将带阻陷波滤波器硬件断开,拔去连接插头,才能使系统稳定。
来源:星梦居
上一篇:锂离子电池太阳能充电器设计


-
常州纯电动汽车:重大利好 高速电动出行2023-11-30
-
插电混动和纯电动汽车孰好孰坏2023-11-30
-
用于电动汽车的创新滤波器解决方案2016-06-13
-
EMC元件:用于电动汽车的创新滤波器解决方案2016-06-13
-
如何正确保养纯电动汽车电池?2016-06-10
-
纯电动汽车在中国真的会火吗2016-06-10
-
年产20万辆纯电动汽车项目在赣州开工 年产值可达240亿元2016-04-29
-
广汽2016年主推插电式混动和纯电动汽车2016-03-24
-
纯电动汽车与氢燃料电池汽车发展所面临的问题2016-03-18
-
纯电动汽车成为驱动汽车产业发展新动能 将迎来新一轮蓬勃发展2016-03-16
-
华泰纯电动汽车iEV230上市 售价21.35万起2016-03-14
-
北汽新能源欲借上海再度发力纯电动汽车分时租赁2016-03-07
-
纯电动汽车总数 破2万辆2016-01-19
-
奇瑞S18纯电动汽车2015-12-18
-
长城腾翼C20纯电动汽车2015-12-18