
五部门关于开展2024年新能源汽车下乡活动的通知
一种低容量可逆调速系统的设计方案
来源:新能源汽车网
时间:2016-06-13 19:09:23
热度:
一种低容量可逆调速系统的设计方案 摘要:低容量可逆调速系统设计即为“电流与转速双闭环直流调速系统的设计”,长期以来,直流电动机因其具有调节转速比较灵活、方法简单、易于大范围内平滑
摘要:低容量可逆调速系统设计即为“电流与转速双闭环直流调速系统的设计”,长期以来,直流电动机因其具有调节转速比较灵活、方法简单、易于大范围内平滑调速、控制性能好等特点,一直在传动领域占有统治地位。鉴于此,本文提出了一种低容量可逆调速系统的设计方案, 该设计方案通过仿真测试,结果表明该方案实现符合参数要求,并且验证了双闭环调速系统比起单环系统更稳定。
1.引言
随着社会经济的发展,直流电动机在理论和实践上更加成熟,例如双闭环调速系统具有极好的运行和控制性能,在工业生产中始终占有相当的比例。由于资金条件有限和本着研究开发的态度大多采用仿真来进行模仿。
目前在matlab软件仿真中,很多公式和参数计算过后都需要通过建模,本文直接把得到的参数通过程序运算,输入到所得到的的模型中,简化了程序,节约了大量的时间,获得一定的经济效益,通过simulink仿真,使得模型更简明,本文主要介绍电源的选择,控制电路的设计,ACR和ASR的参数设计、系统仿真实现分析,通过满足一定的参数,实现电动机的运转,达到预期效果。
2.双闭环控制电路设计
2.1 转速调节器(ASR)的设计和电流调节器(ACR)的设计
选定额定转速nN 对应的转速给定电压,当在0~ 之间变化时,对应转速n在0~nN之间变化,一般可选 ,于是可选定转速检测系数。
转速调节器(ASR)的输出作为电流调节器(ACR)的输人给定信号,首先应选定ASR的输出限幅值,则对于电枢电流应有如下两式成立:
2.2 直流可调电源设计
电流调节器ACR的输出c U 是可调直流电源的输入值,首先选定ACR的输出控制限幅值, 对应于直流电源最大输出电压,稳态时有。根据直流电动机的稳态电压平衡方程:
U = E + RI = C n + RI ,为了保证额定转速nN时,直流电源仍能提供最大电枢电流 ,应满足下式,并留有一定裕量。
3.可逆控制的主要问题
无论是采用改变电枢电压的极性或改变励磁磁通的方向来改变直流电动机的转向,都需要其供电电源能够输出极性可变的直流电压。
基于PWM控制的H型可逆直流电源,其主电路拓扑结构与控制原理如图1-2所示,其主电路开关器件可采用IGBT、Power MOSFET以及智能功率模块IPM,常应用于中、小功率的可逆直流调速系统(如图1所示)。

图1-a绘出了H型可逆脉宽调速系统的基本原理图,由4个电力电子开关器件1 4 S ? S和续流二极管构成桥式电路拓扑。H型可逆PWM变换器的控制方式有:双极式控制、单极式控制和受限单极式控制等。
现以双极式控制为例,说明H型可逆PWM变换器的工作原理。
1)正向运行(此期间2S 和3 S 始终保持断开)第1阶段,在0 on ≤ t ≤ t 期间, 1 4 S和S 同时导通,电动机M的电枢两端承受电压+ d0 U ,电流d i 正向上升;第2阶段,在on t ≤ t ≤ T 期间, 1 4 S和S 断开, 续流,电动机M的电枢两端承受电压- ,电流下降;但由于平均电压高于电动机的反电动势E,电动机正向电动运行,其波形如图1-b.
2)反向运行(在此期间1 4 S和S 始终保持断开)
第1阶段,在0 on ≤ t ≤ t 期间, S 2 和S3 断开,通过续流,电动机M的电枢两端承受电压+ ,电流- 沿反方向下降;第2阶段,在on t ≤ t ≤ T期间, S2 和S 3 同时导通,电动机M的电枢两端承受电压- ,电流- 沿反方向上升;由于平均电压|- |高于电动机的反电动势|-E|,电动机反向电动运行,其波形如图1-c.改变两组开关器件导通的时间,也就改变了电压脉冲的宽度。
如果on t 表示1 4 S和S 导通的时间,开关周期T和占空比的定义和上面相同,则电动机电枢两端电压平均值为:

如果令γ = 2ρ 1,调速时 的可调范围为0~1,-1< <+1.由此,调节占空比,可获得可调的直流输出,以控制直流电动机转速。
(1)当>0.5时, 为正,电动机正转;
(2)当<0.5时, 为负,电动机反转;.
(3)当=0.5时, =0,电动机停止。
由于电动机停止时电枢电压并不等于零,而是正负脉宽相等的交变脉冲电压,因而电流也是交变的。这个交变电流的平均值为零,不产生平均转矩,徒然增大电机的损耗,这是双极式控制的缺点。但它也有好处,在电动机停止时仍有高频微振电流,从而消除了正、反向时的静磨擦死区,起着所谓“动力润滑”的作用。
4.控制电路的参数计算与设计
4.1 参数确定
直流电机:PN=5.5kw,UN=220V,IN=8A,nN=1490r/ min,电枢回路电阻R=0.8Ω,允许电流过载倍数λ=1.8,电磁时间常数Tl=0.048s , 机电时间常数Tm=0.185s.
PWM调制参数:电源电阻: ,放大倍数,时间常数: ,开关频率: , 电流反馈滤波时间常数,转速反馈滤波时间常数。给定电压最大值调节器限幅电压。
电流反馈系数:

转速反馈系数:
4.2 电流环控制器的设计
PI调节器利用比例部分能迅速响应控制作用,而用积分部分最终消除稳态偏差。
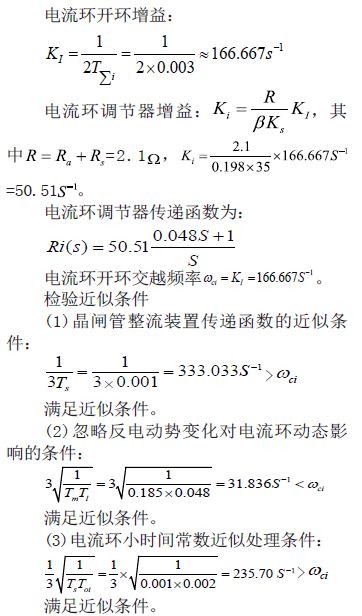
另外,比例积分调节器还是提高系统稳定性的校正装置,因此,它在调速系统和其它控制系统中获得了广泛的应用。
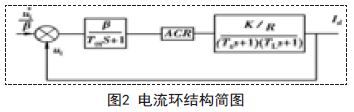
取电流调节器为PI调节器,将电流环设计成典型I型系统,则有传递函数电流环控制简图如图2所示。
4.3 转速环控制器的设计
对于转速外环而言,设计成典型I型系统之后的电流环只是一个被控对象环节。因此转速环设计的第一步是求出电流环的闭环传递函数。转速环被控对象中已经有了一个积分环节,为了实现转速跟踪控制无静差,转速调节器中应该包含一个积分环节。因此转速环一般设计成典型Ⅱ型系统,转速调节器设计成PI调节器。如图3所示。

按跟随和抗干扰性能都较好的原则,选取中频段宽度为h= 5 ,则:
转速环开环增益:

5.仿真分析
5.1 电流环的对数频率特性仿真及其分析电流环为典型Ⅰ型系统,其传递函数为:
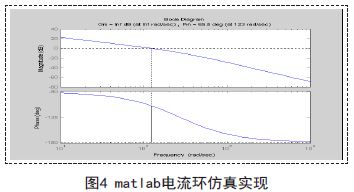
此系统为I型系统斜率分别为-20和-40.
由于其中频段大都是-20的斜率则此系统由于相角裕度大于0度其稳定性较好。而在高频段斜率为-40则其抗干扰能力较强。综上所述此系统适用于设计过程中。
5.2 转速环的对数频率特性仿真及其分析
转速环为典型Ⅱ型系统,其传递函数为:

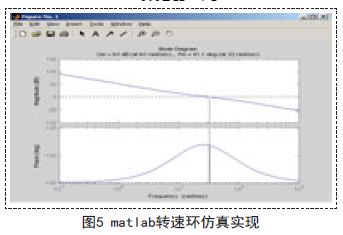
此系统为2阶系统。相角裕度大于0则此系统稳定。此系统可化为一个2阶的积分环节,此系统的精确度较高但是其快速性较差正适合我们所设计的系统防止其发生过冲。
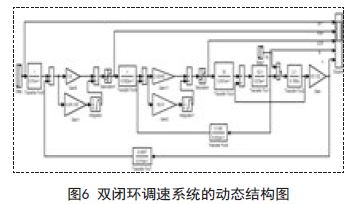
5.3 系统动态结构及其仿真
给定一个阶跃响应电压,通过matlab软件建立仿真动态模型如图6所示。
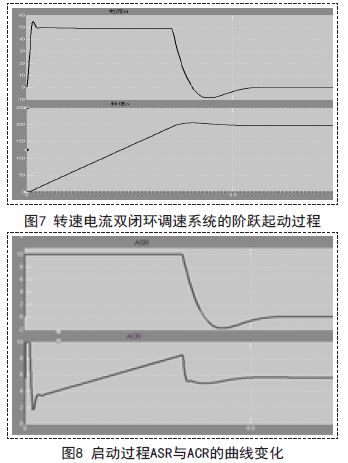
如图7所示为转速电流双闭环调速系统的阶跃启动过程,图8中为转矩和电枢电流的变化,最后达到系统要求,符合参数要求。实验表明,观测到的波形与理论上波形相符,整个设计方案切实可行。
6.结论
本文提出了一种低容量可逆调速系统的设计方案,本方案所设计的低容量可逆调速系统主要是为了体现低容量可逆调速对电动机的控制,通过已知给定的参数计算和设计ACR以及ASR环节,采用PI调节,达到给定指标,算出各未知参数,然后通过MATLAB软件进行仿真,分析结果与数据,从而得出结果表明该方案实现符合参数要求,并且验证了双闭环调速系统比起单环系统更稳定,达到了系统所满足要求。
上一篇:尼桑研发乙醇燃料电池


-
常州纯电动汽车:重大利好 高速电动出行2023-11-30
-
插电混动和纯电动汽车孰好孰坏2023-11-30
-
混合动力系统分类2023-11-30
-
混合动力系统分类2023-11-30
-
混合动力汽车动力系统有缺点对比分析2023-11-30
-
研究锂亚电池内阻与容量的关系2016-06-15
-
新型电动汽车锂电池管理系统的设计方案2016-06-15
-
超低功耗的锂电池管理系统设计2016-06-15
-
基于单片机的脉冲快速充电系统设计2016-06-15
-
分析纯电动车电池管理实训系统2016-06-15
-
标致雪铁龙新一代电动车技术曝光 电池容量暴涨11倍2016-06-14
-
分析纯电动车电池管理实训系统2016-06-13
-
如何看汽车电池热管理系统2016-06-13
-
特斯拉电动汽车电池热管理系统详解2016-06-13
-
解析48V锂离子电池系统的关键技术及应用现状2016-06-13