
五部门关于开展2024年新能源汽车下乡活动的通知
基于SAEJ1939的混合动力客车ABS控制系统
来源:新能源汽车网
时间:2016-06-13 19:07:30
热度:
基于SAEJ1939的混合动力客车ABS控制系统 摘要 研究了混合动力客车的制动过程和能量回收原理,提出在刹车防抱死系统(ABS)参与制动时,混合动力客车制动控制策略和能量回收的
摘要 研究了混合动力客车的制动过程和能量回收原理,提出在刹车防抱死系统(ABS)参与制动时,混合动力客车制动控制策略和能量回收的实现。依据SAEJ1939通讯协议的具体内容,制定了ABS控制系统通讯的数据报文格式,实现了ABS控制器与整车控制器(HECU)之间的数据交流与共享。
开发电动汽车(Electric Vehicle,EV)是实现汽车能源多元化和零排放的最终选择。由于车用动力电池性能难以满足使用要求,使其成为严重制约电动汽车应用与发展的"瓶颈".20世纪90年代后,世界许多汽车生产商把重点转向了可实施性强的混合动力电动汽车的研究与开发。混合动力汽车(Hybrid-Electric Vehicle,HEV)是采用传统的内燃机和电动机作为动力源,通过混合使用热能和电力两套系统,达到节省燃料和降低排气污染的目的。此种混合动力汽车与电动汽车相比较,既能保持电动汽车的超低排放的优点,又能发挥传统内燃机持续时间长、动力性能好的优点,同时采用制动时的能量回收,降低制动能耗,提高续驶里程。
为提高混合动力汽车燃油经济性和能量回收的利用率,并保证汽车制动过程中行驶方向的稳定与安全性,将混合动力车辆能量回收策略与防抱死刹乍系统(ABS)控制策略集成于一个控制器中,称为ABS控制器。混合动力汽车采用两个动力源,机构复杂,车上大量采用电子装置,如整车控制器(HECU)、ATM控制器、电机控制器、电池控制器、CAN仪表控制器、ABS控制器等。这些复杂的控制器需要检测及不断地交换大量数据,传统的连接方式不但繁琐、昂贵而且可靠性差、维护成本高,无法满足车辆通讯的要求。因此,用网络连接各种电子系统以实现通讯是现代汽车发展的必然趋势。在混合动力汽车中,以J1939通讯协议为基础,实现ABS控制器与其他控制器之间的通讯,以达到在车辆运行或制动过程中回收能量且使车辆处于最佳的控制状态。
1 混合动力客车ABS控制系统
1.1 混合动力汽车概况
混合动力汽车(Hybrid-Electric Vchicle,HEV)一般是指使用蓄电池的电能和汽(柴)油两种动力源的车辆,在车辆的行驶过程中存在蓄电池电能和内燃机机械能能量分配和能量存储的过程,而且一般有制动能量回收的过程。混合动力汽车根据运行工况合理利用内燃机和电机驱动力驱动汽车,使每个动力源在分别发挥各自优点的同时,弥补另一个动力源的不足。这样二者互补工作,可使汽车的热效率提高10%以上,废气排放可改善30%以上。它既是燃油发动机汽车向电动汽车的一种过渡车型,也是一种相对独立的车型。
整车控制器是混合动力电动客车的核心,它根据输入信号,判断混合动力汽车的当前状态,并经过一定的控制逻辑和控制算法的判断分析,确定向各个子系统发出当前控制信号的量值。由于在城市道路上,混合动力汽车是频繁在起步、行驶、加速、减速和怠速停车各个工况之间运行,因此通过整车控制器的任务分配,将发动机和电机按一定的策略进行能量分配,从而可以使发动机尽量工作在高效区,减少汽车尾气的排放。由于混合动力汽车在启动时采用电机提供动力,并在启动发动机后以较高的怠速运转,从而减少了发动机在启动时的废气排放;在红绿灯时可以自动关闭发动机,减少怠速空转时间;在低于预定车速时,可以使用纯电动驱动,避免发动机在低转速下工作。减速时,刹车装置可以将刹车时的机械能转化为电能,回收了部分能量,这些都提高了整车的燃料经济性,并且与同类发动机车型相比,也减低了排放。
1.2 混合动力客车ABS控制策略
混合动力汽车与传统汽车相比,可以在制动过程中将牵引电机作为发电机,依靠车轮的反相拖动产生电能和车轮制动力矩,从而在减缓车辆速度的同时将部分动能转化为电能,回收一部分车辆在传统制动过程中损失的能量,以备再利用。因此,制动能量回收系统能够改善HEV的能量回收利用率,有效减少车辆的排放并提高燃油经济性和车辆的形式里程。
ABS参与制动过程的目的是为了增加混合动力汽车的能量回收部分。与传统汽车相比,混合动力汽车的制动需求与传统汽车有所差异。在混合动力汽车中,当驾驶员抬起油门踏板,则说明驾驶员有制动需求。若此时整车电子控制单元(HECU)判断电池不需要充电,则不要求电机参与并提供任何制动力矩与能量回收。在这种情况下,如果驾驶员踩下制动踏板时,整个制动过程由刹车气压系统来实现。当车辆的减速度达到了ABS系统激活的门限值的时候,ABS系统被激活并独立调节车辆的刹车过程。如果车辆的制动强度比较弱而没有达到ABS系统激活的条件时,则整车的制动力矩维持原车的制动力矩。上述制动过程不参与能量回收。
若驾驶员抬起油门踏板且有制动需求时,且此时整车电子控制单元(HECU)判断电池处于亏电状态或电池有充电需求,这时整车HECU给电机电子控制单元ECU发送信息,要求电机参与制动过程,而此时电机提供的最大制动扭矩为电机输出扭矩的20%,即电机提供恒扭矩制动。在这种情况下,驾驶员从抬起油门踏板到踩下制动踏板的低强度制动过程中,电机能独立且充分回收能量。当驾驶员踩下制动踏板的时候,若车辆的减速度门限值没达到ABS系统激活的条件,而此时电机提供的制动扭矩保持不变,同时原车的常规制动系统也提供制动力矩,整车刹车制动力矩=电机制动力矩+原车制动力矩,在这种中强度的制动情况下,电机可以充分回收能量。当驾驶员在踩下制动踏板时,若车辆的减速度门限值达到ABS系统激活的条件,此时ABS系统被激活,且ABS控制单元给整车控制单元HECU发送信息,要求解除电机制动。在此种高强度制动情况下,车辆的制动过程完全依据车轮当时所处的路面状况进行独立的ABS调节,完成整个车辆制动过程。上述过程可实现在刹车时车辆的稳定性、方向可控性和安全性,且有效地回收了能量。
2 SAE J1939协议
2.1 CAN总线内容
控制器局域网CAN(Controller Area Network)总线是20世纪80年代初德国BOSH公司为解决现代汽车众多控制单元、测试仪器之问实时交换数据而开发的一种串行通讯协议,经多次修订,于1991年9月形成技术规范2.0版本,该版本包括2.0A和2.0B两部份。它是一种有效支持分布式控制和实时控制的串行通讯网络,速率可达1Mbit·s-1.为规范通讯系统与各系统的兼容,1993年11月ISO颁发了道路交通工具数据信息交换高速通讯局域网(CAN)国际标准。美国的汽车工程学会SAE于2000年将CAN2.0B为基础,提出J1939通讯协议,并成为货车、客车、农业和建筑机械中控制器局域网的标准。
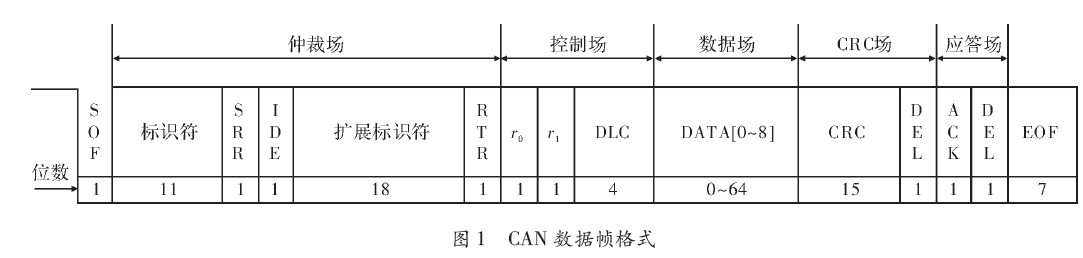
CAN遵从开放系统互连OSI 7层参考模式,按照IEEE802.2和IEEE802.3标准,其通讯接口集成了CAN协议的物理层和数据链路层功能。按照携带信息的数据类型可分为4种帧格式:数据帧是网络信息的主体,用于节点间数据传递。远程帧由节点发送,以请求发送具有相同标识符的数据。出错帧可由任何节点发送,以检测总线错误。超载帧用于提供当前的和后续的数据帧和远程帧之间的附加延时。数据帧由7个不同的位域组成:帧起始(SOF)、仲裁场、控制场、数据场、循环冗余校验场(CRC)、应答场(ACK)、结束帧(EOF)组成。CAN协议具有标准帧格式CAN 2.0A和扩展帧格式CAN2.0B,标准帧格式采用11位标识符而控制帧格式采用29位标识符格式。其数据帧格式如图1所示。由于CAN总线是一种串行多主站控制器局域网总线,它具有较高的网络安全性、通讯可靠性和实时性,简单实用、网络成本低,因此适用于汽车计算机控制系统和环境温度恶劣、电磁辐射强和振动大的工作环境。
上一篇:电线杆能传输手机信号还能做充电桩


-
什么是混合动力汽车2023-11-30
-
虽不享受补贴 传统混合动力车仍纷至沓来2023-11-30
-
什么是强混合动力车2023-11-30
-
11月国内插电式混合动力乘用车BMS装机情况统计2023-11-30
-
混合动力汽车保养注意事2023-11-30
-
混合动力系统分类2023-11-30
-
混合动力系统分类2023-11-30
-
混合动力汽车的优点2023-11-30
-
混合动力电动汽车工作原理2023-11-30
-
江苏出台补贴政策 纯电动客车最高补15万元2023-11-30
-
2020年全球混合动力车市场规模将达375万辆2023-11-30
-
燃料电池客车最有希望率先商业化2023-11-30
-
混合动力汽车的六大关键技术2023-11-30
-
混合动力车优缺点2023-11-30
-
混合动力汽车动力系统有缺点对比分析2023-11-30